

Nomenclature
1. 서 론
2. Pixhawk Hardware
3. Pixhawk Software
3.1 PX4
3.2 Ardupilot
3.3 MAVLink
4. Pixhawk 탑재
5. 시험발사 결과 및 분석
5.1 Vertical Position
5.2 Horizontal Position
5.3 IMU Data
6. 결 론
Nomenclature
UAV : unmanned aerial vehicle, 무인항공기
FCC : flight control computer, 비행 제어 컴퓨터
IMU : inertial measurement unit, 관성 측정장치
uORB : micro open request broker
MAV : micro air vehicle, 소형 무인 비행체
GCS : ground control system, 지상 제어 시스템
GPS : global positioning system
CG : center of gravity, 무게중심
EKF : extended Kalman filter, 확장 칼만 필터
1. 서 론
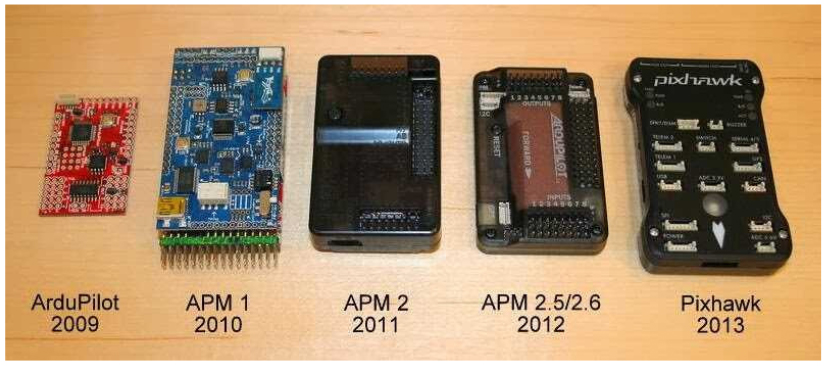
최근 UAV의 비행 제어 시스템은 다양한 오픈 소스 FCC의 등장과 함께 상호작용하며 발전하고 있다. Fig. 1과 같이 Arduino를 기반으로 개발된 Ardupilot과 APM을 시작으로, 상업용 UAV에서 널리 활용되는 Pixhawk로 이어지고 있다. 이에 더해서, 센서 및 프로세서와 같은 하드웨어뿐만 아니라 소프트웨어 측면에서도 비약적인 발전이 이루어졌고, 보다 복잡한 로직과 고급 제어 알고리즘의 개발이 가능해졌다[1]. 이러한 오픈 소스 기반 FCC는 UAV의 제어를 위해 개발되었으나, 높은 확장성을 가져 무인 Rover, 무인 선박 등 다양한 자율 시스템에도 광범위하게 적용되고 있다[2-3].
그러나 발사체를 위한 에비오닉스의 경우, 무인항공기와는 다르게 상용화된 통합 플랫폼이 부족하며 범용성이 떨어진다. 때때로, 원하는 만큼의 복잡성을 가진 소프트웨어를 탑재하기 어렵다. 민간에서 개발하고 있는 초소형 발사체는 공간상의 제약으로 에비오닉스 하드웨어의 소형화도 필요하다. 또한, 비용의 제약으로 인해서 저가의 센서를 사용하는 경우도 많다. 여러 설계의 고려할 사항을 충분히 고려하지 않으면, 정상적인 작동과 데이터 수집의 신뢰성을 보장하기 어려운 것이 현실이다.
초소형 발사체의 실용적인 활용을 위해서는 안정적인 데이터 수집, 통신, 자세제어 및 유도가 필수적이다. 이를 위해 신뢰성 높은 에비오닉스 시스템의 도입이 요구된다. UAV와 발사체는 요구되는 기능과 수집하는 데이터에서 많은 유사성을 가지기에, UAV에서 사용되는 FCC는 발사체 에비오닉스의 유효한 대안이 될 수 있다.
본 연구에서는 이러한 필요성을 바탕으로, UAV의 FCC 중 하나인 Pixhawk 시스템을 초소형 발사체에 적용하여 안정적인 작동을 검증하였다.
2. Pixhawk Hardware
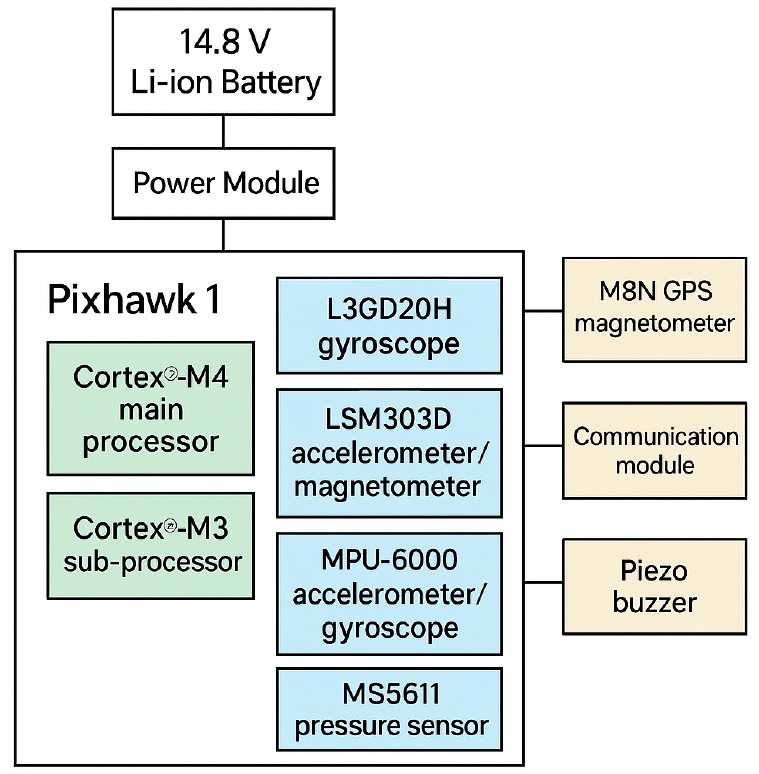
Pixhawk는 UAV의 자율비행을 위해 개발된 FCC이다. 본 연구에서 사용한 Pixhawk 1의 경우, ARM® Cortex® M4 프로세서를 사용하며 Fail-safe를 위해 ARM® Cortex® M3를 보조 프로세서로 사용한다. 보드에 L3GD20H 16 bit 3축 자이로스코프와 LSM303D 16 bit 3축 가속도/3축 지자계 센서, MPU-6000 16 bit 3축 가속도 센서/3축 자이로스코프, MS5611 기압계가 내장되어 있어 자세, 방위, 고도 측정이 가능하다[4].
이처럼, Pixhawk는 가속도 센서와 자이로스코프의 이중화 구조를 채택하고 있어 IMU의 Fail-safe를 달성할 수 있다. 또한 I2C, SPI, CAN, UART 입력 인터페이스를 지원하여[4] 필요로 하는 센서를 추가하기 용이하다.
Pixhawk의 하드웨어 회로도와 레이아웃은 모두 오픈 소스로 공개되어 있다. 이를 통해 시스템의 신뢰성을 검증할 수 있으며 개선점을 도출하여 반영할 수 있다. 또한, 이렇게 변형된 하드웨어를 상업적으로 사용하여도 지식재산권 문제가 없기에 자유로운 사용이 가능하다.
3. Pixhawk Software
Pixhawk의 하드웨어를 개발한 Dronecode 재단의 PX4 프로젝트에서는 PX4 소프트웨어를 개발하여 하드웨어에 적용하였지만, Ardupilot 프로젝트를 통해 개발된 Ardupilot 또한 적용할 수 있다.
3.1 PX4
PX4는 UAV의 제어 및 유도를 목적으로 개발된 NuttX 기반 오픈 소스 소프트웨어이다. 이 소프트웨어는 초기에는 취리히 연방 공과대학교에서 개발되었으며, 현재는 Dronecode 재단의 주도로 개발되고 있다. 또한 UAV 뿐만이 아니라 무인 Rover, 무인 선박 등 다양한 자율 시스템에 적용되고 있다[1,2,3].
PX4의 가장 큰 특징 중 하나는 모듈화된 구조를 가져, 각 모듈이 독립적으로 수행될 수 있다는 점이다. 이러한 특성으로 인해, 특정 모듈에서 발생한 문제가 다른 모듈에 영향을 미치지 않으며, 새로운 모듈 개발 시 기존 모듈을 고려해야 할 필요가 적어 시스템의 확장성이 높고 유지 보수가 용이하다.
모듈 간의 통신은 uORB를 통해 이루어지며, 이를 통해 모듈 간의 독립성을 보장하고 안정적인 데이터 전송을 지원한다[1,5].
3.2 Ardupilot
Ardupilot은 2009년 UAV의 비행 제어를 위해 처음 개발되었다. 초기 Ardupilot은 단순한 비행 제어 소프트웨어였으나, 지속적인 발전을 통해 현재는 다양한 하드웨어와의 호환성을 갖추고 고도화된 제어 알고리즘을 적용하여 무인 Rover, 무인 선박 등 여러 자율 시스템에서도 널리 사용되고 있다.
Ardupilot은 기본적으로 하드웨어에 종속되지 않는 구조를 채택하고 있어, HAL(Hardware Abstraction Layer)을 통해 다양한 하드웨어 플랫폼에 적용 가능하다. 이러한 특성은 Ardupilot의 유연성과 확장성을 크게 향상시키며, 새로운 하드웨어의 통합을 용이하게 한다[1].
3.3 MAVLink
MAVLink는 Header만을 이용한 MAV 통신 프로토콜이다. MAVLink의 패킷은 SAE의 AS-4 표준을 참조하여 한 패킷에 8-263 byte를 전송할 수 있다. 이 프로토콜은 오픈 소스로 공개되어 있으며, Ardupilot, PX4 등의 플랫폼과 QGroundControl, Mission Planner, Tower 같은 다양한 GCS 소프트웨어에서 지원된다. MAVLink에 정의된 함수만 사용하면 비행체와 GCS 간 별도의 설정 없이 연결할 수 있으며, 사용자가 직접 함수를 정의하여 원하는 데이터를 자유롭게 전송할 수도 있다[6].
4. Pixhawk 탑재
본 연구에서는 Pixhawk에 내장된 L3GD20H 16 bit 3축 자이로스코프, LSM303D 16 bit 3축 가속도/3축 지자계 센서, MPU-6000 16 bit 3축 가속도 센서/3축 자이로스코프, MS5611 기압계 외에도 I2C 인터페이스를 통해 u-blox M8N 지자계 센서/GPS 모듈을 추가로 탑재하였다. 전체 하드웨어 구성은 Fig. 2에 나타내었다.
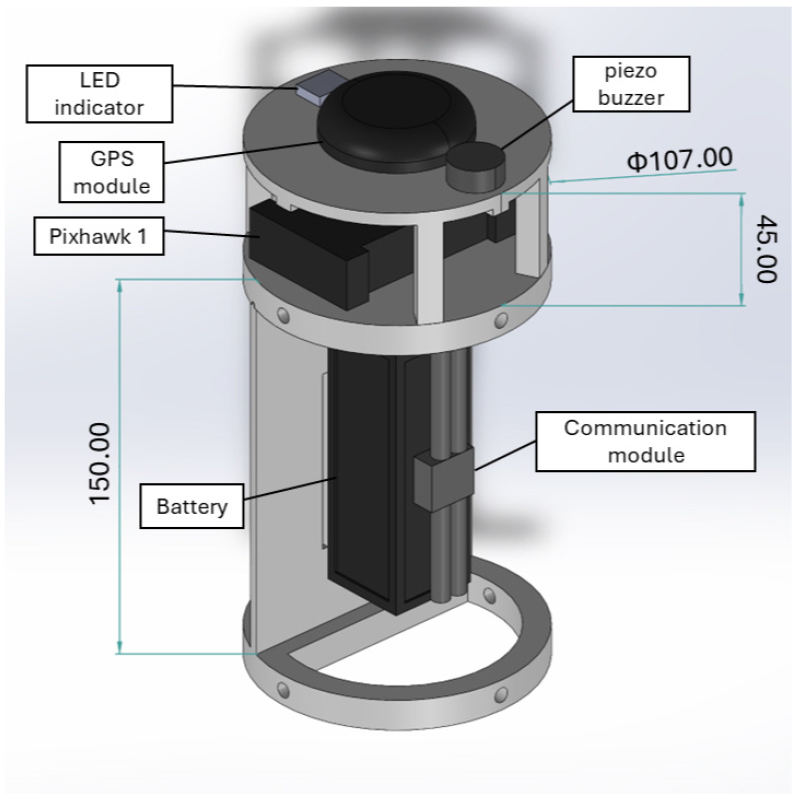
Pixhawk의 탑재를 위해 Fig. 3과 같은 구조물을 3D 프린팅으로 제작하였으며 발사체의 CG와 가깝게 Pixhawk를 고정하였다. 또한 풍압에 의해 기압계가 교란되는 것을 방지하기 위해 동체 측면의 정압공을 제외한 모든 틈을 실링하였다.
GCS와의 통신은 MavLink 프로토콜을 사용하였으며, GCS 소프트웨어로는 Ardupilot의 Mission Planner를 활용하였다. 데이터 수집은 Pixhawk에 삽입된 Micro SD카드를 통해 이루어졌으며, 세부적인 로그 설정은 Table 1에 명시하였다.
Table 1.
Logging option configured at mission planner.
5. 시험발사 결과 및 분석
Fig. 4는 한국항공우주연구원 고흥항공센터 내 활주로에서 Pixhawk 시스템을 탑재한 발사체의 시험발사를 수행한 모습이다. 시험발사는 200 N급 아마추어 발사체를 이용하여 수행되었고 발사체는 약 280 m까지 상승한 후 낙하산을 통해 회수되었다.

5.1 Vertical Position
Fig. 5에 기압계 Raw 데이터와 GPS Raw 데이터, IMU 데이터를 기반으로 EKF를 이용해 보정된 고도 데이터를 나타내었다. 측정된 최고 고도는 각각 251 m, 261 m, 276 m였으며, 기압계와 GPS 측정 데이터는 IMU 기반 데이터보다 평균 23.2 m, 9.69 m 낮게 측정되었다.
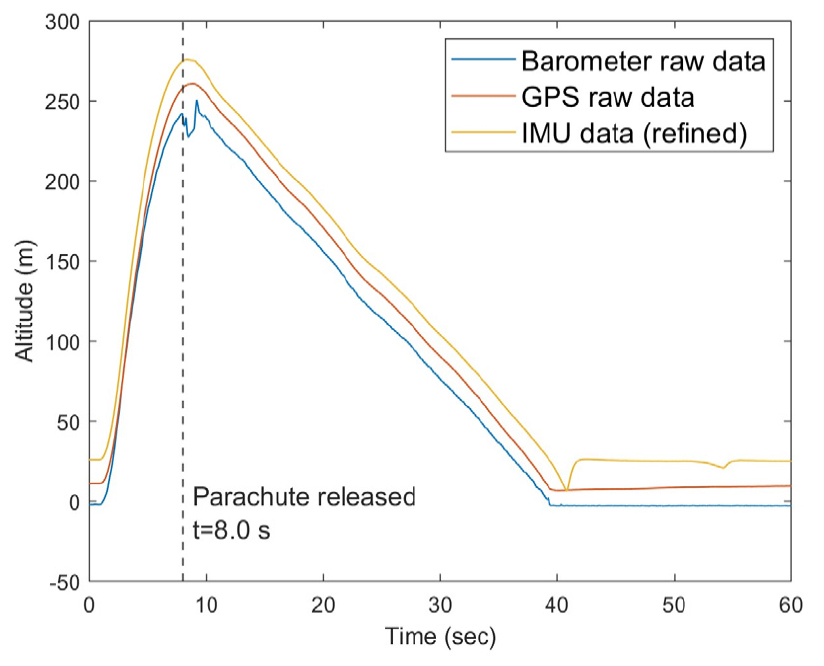
기압계는 발사체 전원 인가 지점을 기준으로 하여 상대 고도를 측정하며, GPS 데이터는 GPS 모듈에서 제공하는 EGM-96 지오이드(geoid) 기준 고도, IMU 데이터는 WGS 84 타원체 기준의 고도를 나타낸다. 다만, 본 연구에 사용된 모듈은 메모리의 한계로 EGM-96 모델의 저주파수 성분만을 포함한 Low-Res 지오이드 모델이 적용되어 있다. 이로 인해 지오이드고를 나타내는 GPS.GMS 파라미터 또한 EGM-96 기반 지오이드고(geoidal height)인 약 17 m와는 다르게 비행 중 평균 9.71 m로 보고되었으며, 이로 인하여 오차가 발생하였다.
발사체가 지면과 수직인 상승과 하강 시에는 기압계 데이터가 GPS, IMU 데이터와 같은 경향을 보인다. 따라서, 최고점 근방에서 나타난 기압계 데이터의 Noise는 Apogee 이후 낙하산 전개 전까지 발사체가 지면과 평행한 자세로 낙하하며 정압공으로 외풍이 유입되어 발생한 것으로 보인다. 다만, 실링에 대한 성능평가가 이루어지지 않았기에 실링의 결함에 기인하였을 가능성 또한 배제할 수 없다. 이에, 본 시스템을 사용할 시 신뢰성 높은 실링이 필요하며 정압공의 구조를 외풍이 유입되지 않는 구조로 설계하는 것이 요구된다고 여겨진다.
40 s 즈음에서 IMU 데이터가 기압계, GPS 데이터와는 다르게 상승하는 것을 확인하였다. Pixhawk 시스템은 가속도 데이터를 기반으로 IMU에서 고도를 추정하기에 지면과의 충돌 시점에서 순간적으로 큰 가속도가 가해지며 고도 추정에도 영향을 미쳤다. 하지만 기압계와 GPS 데이터를 이용하여 보정 작업을 수행하기 때문에 잠시 후 보정이 이뤄지며 착지 지점의 타원체고인 약 26 m의 값을 유지하는 것을 볼 수 있다.
Fig. 6에는 GPS의 수평, 수직 정확도를 나타내었다. 비행 전 과정 중 2.5 m 내외의 정확도로 고도가 측정되었음을 확인할 수 있다. 일반적으로 5 m 내의 수직 오차를 갖는 GPS 시스템의 특성상[7] 본 연구에서 사용한 u-blox M8N 모듈이 발사체에 사용되어도 뚜렷한 성능 저하가 발생하지 않는 것을 확인하였다.

5.2 Horizontal Position
Fig. 7에는 GPS Raw 데이터 상의 이동 경로와 IMU 데이터를 기반으로, EKF로 보정하여 얻은 이동 경로를 나타내었다. 두 데이터가 유사한 모습을 보이는 것이 확인된다.
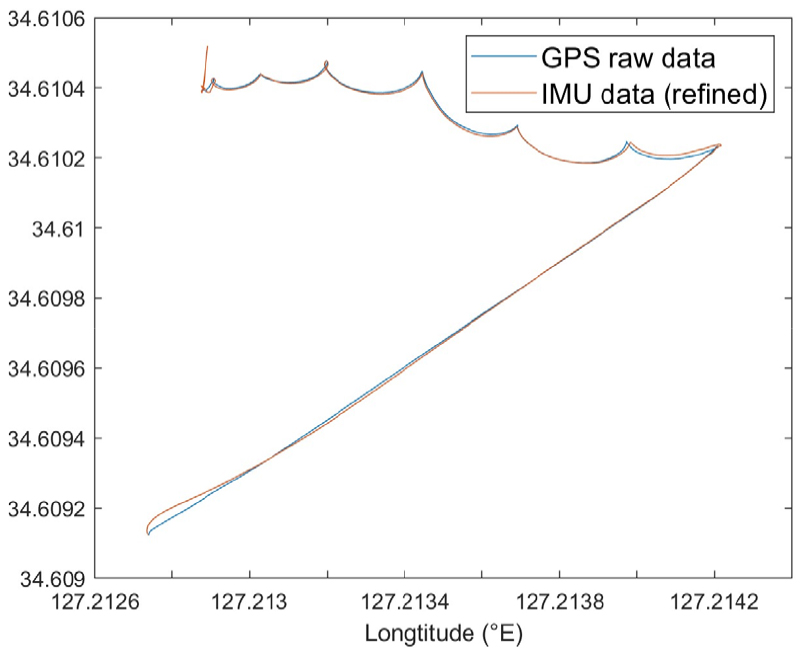
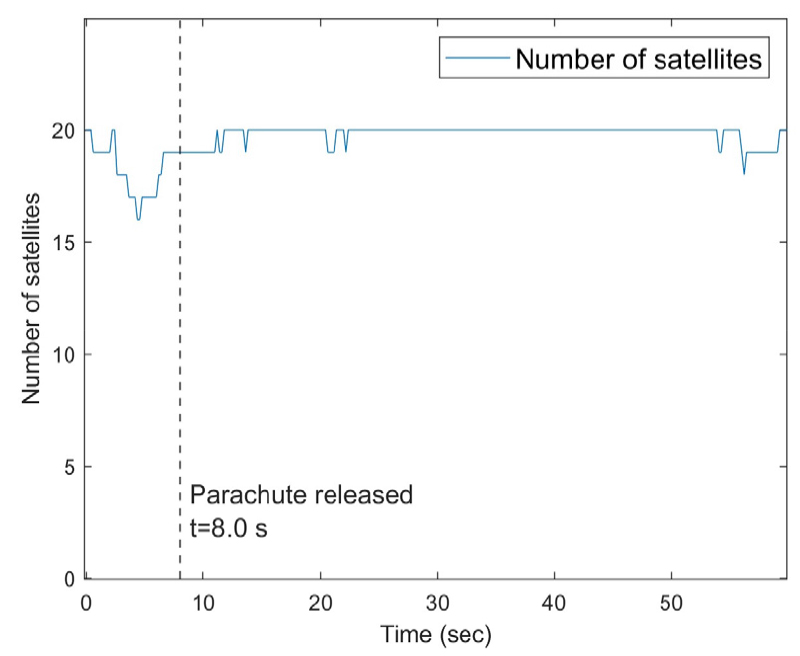
Fig. 8에는 GPS 모듈이 신호를 수신한 위성의 개수를 나타내었다. 발사 전 과정 중 20 기 내외의 위성에서 신호를 수신하였으며 상승 중 일부 위성 신호의 수신이 원활하지 않았던 것으로 보인다. 그럼에도 15 기 이상의 위성에서 신호를 수신하였으며 Fig. 6에서 볼 수 있듯이 수신한 신호를 통해 계산된 GPS 데이터가 2 m 내외의 수평 정확도를 가졌다. 일반적으로 3 m 내의 수평 오차가 발생하는 GPS 시스템의 특성상[7] 사용한 u-blox M8N 모듈이 발사체에 사용되어도 뚜렷한 성능 저하가 발생하지 않는 것을 확인하였다.
5.3 IMU Data
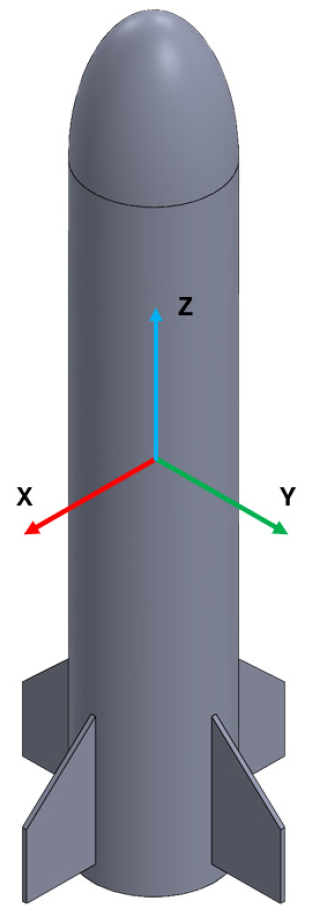
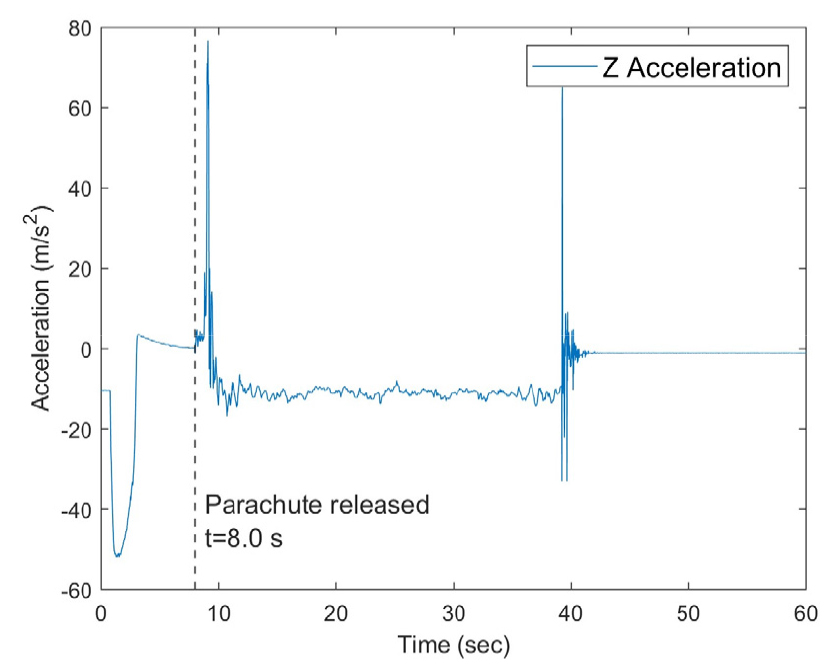
Pixhawk의 IMU는 가속도 센서와 자이로스코프의 Raw 데이터를 Low-Pass Filter로 처리하여 사용한다. X, Y, Z 각각의 방향은 Fig. 9와 같다. 측정된 Z 방향의 가속도는 Fig. 10에 나타냈고, 전체 비행 중 76.7 m/s2, 추력 비행 중 - 52.9 m/s2의 극값을 보였다. Fig. 11은 발사체의 X, Y 방향으로 가해진 가속도를 보여준다. 전체 비행 중 127.8 m/s2, 추력 비행 중 3.5 m/s2의 극값을 보였다.
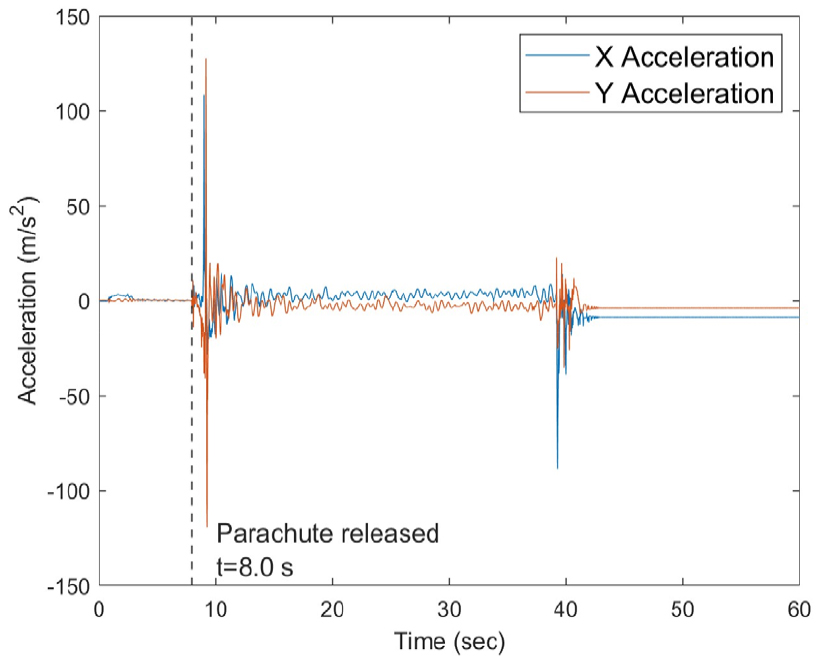
Raw 데이터 상 Y축에서 낙하산 전개 시점의 충격에 의해 약 5 ms 간 측정 한계인 ± 16 g를 초과하여 clipping이 발생한 것을 확인하였다. 하지만 극도로 짧은 시간 동안이기에 Low-Pass Filter를 거친 IMU 측정값에는 해당 값이 나타나지 않으며 고도, 위치 추정에는 영향을 주지 않았던 것으로 보인다.
Fig. 12는 가속도 센서의 Raw 데이터에 High-Pass Filter를 적용한 후 절댓값을 취한 진동 데이터를 나타낸다. 별도 방진 처리를 하지 않았음에도, 낙하산 전개 시점과 지면 충돌을 제외하고 모든 방향에서 진동은 5 m/s2 이하로 측정되었다. 30 m/s2 이하의 진동은 수용 가능하므로[8] 발사 과정의 진동이 IMU 측정값에 미치는 영향이 미미하다고 판단하였다.
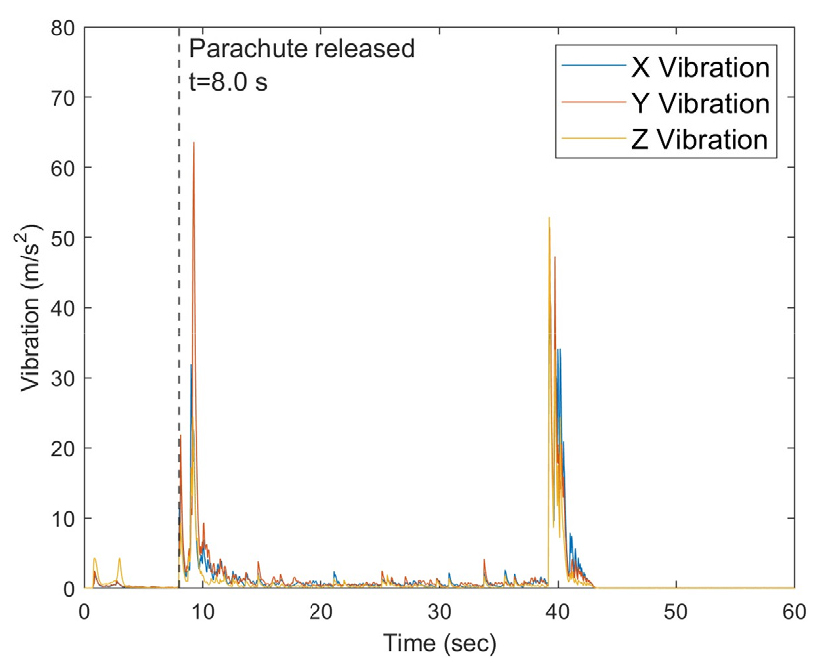
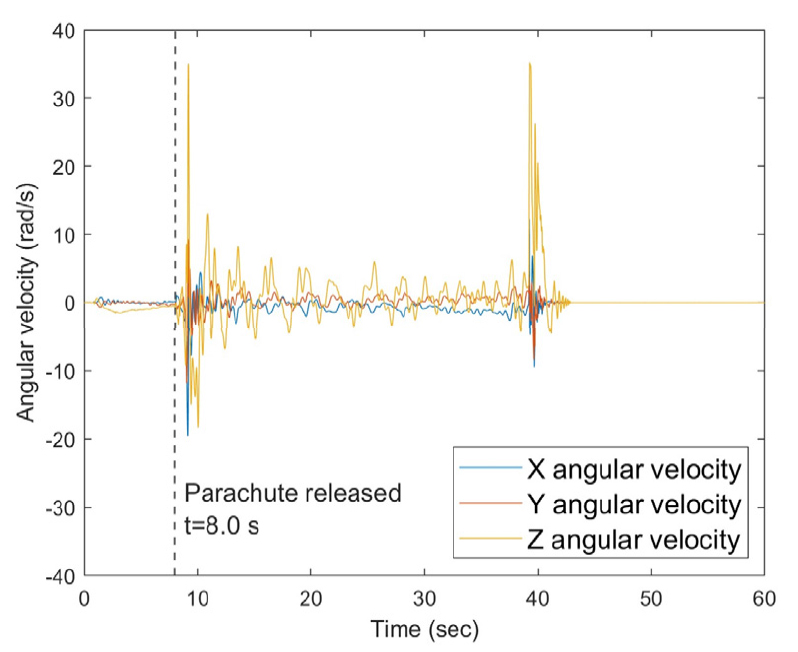
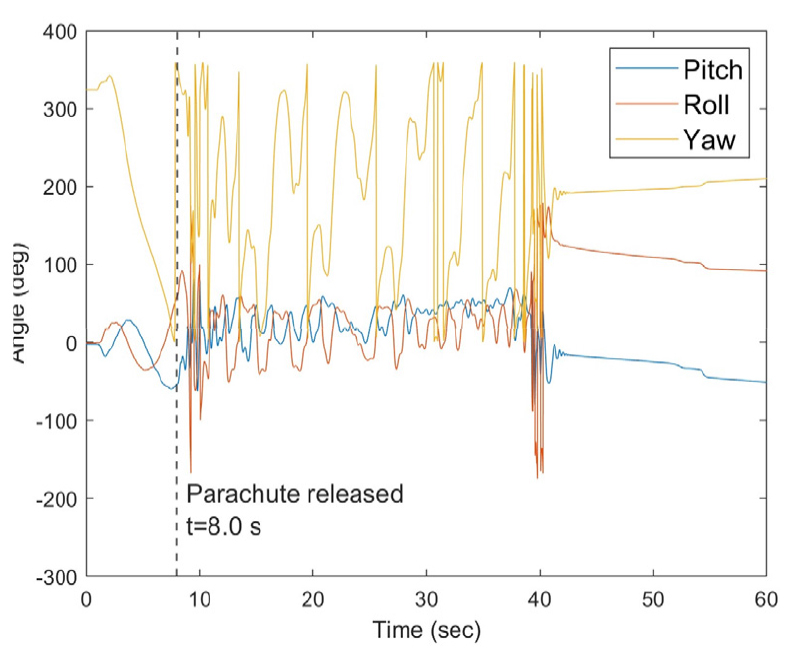
Fig. 13은 자이로스코프에서 측정된 Raw 데이터이다. 최대 각속도는 X, Y, Z 방향 각각에서 34.9 rad/s, - 14.6 rad/s, 34.9 rad/s으로 측정되었다. 낙하산 전개 시와 지면과 충돌 시에 급격한 자세 변화가 발생하며 L3GD20H와 MPU-6000의 측정 한계인 ± 2000 deg/s( ≈ ± 34.9 rad/s)을 초과했던 것으로 보인다. 따라서 ICM-20649, ICM-45689 등 측정 한계가 보다 높은 센서를 사용하는 Cube Orange +, Pixhawk 6X 등의 제품군을 사용하는 것이 필요하다. Fig. 14는 자이로스코프 측정치를 기반으로 구한 Pitch, Yaw, Roll을 나타낸다.
6. 결 론
시험발사를 통해 Pixhawk 시스템의 대부분 센서들이 발사체 내에서 정상적으로 동작하였으며 데이터가 원활하게 수집되었음을 확인하였다. 본 연구는 시험발사를 통해 발사체에 상승 중 최대 52.9 m/s2의 수직 가속도, 발사 전 과정 중 127.8 m/s2의 최대 가속도를 가하며 IMU의 안정성을 검증하였고, 기압계, GPS, IMU 기반 고도 추정치 간 비교와 GPS의 정확도 데이터를 통해 고도 측정의 안정성을 평가하였다. 또한, GPS와 IMU 데이터를 기반으로 추정한 데이터를 비교함으로써 위치 측정을 검증하였다. 결과적으로 Cube Orange +, Pixhawk 6X 등의 시스템을 사용하여 자이로스코프의 안정성을 확보하는 것이 필요하다고 판단하였다. 또한 해당 문제만 해결된다면, 대기권 내에서 운용되는 초소형 발사체를 위한 에비오닉스에 Pixhawk 시스템이 기반 시스템으로 사용되기 적합하다고 여겨진다.
본 연구에서 취득한 데이터 중 기압계 데이터에 Noise가 관찰되었다. 기압계를 통한 고도 측정 시 외풍의 유입에 의해 Noise가 발생할 수 있으므로[9], 센서의 이중화와 실링 방식의 변경, 정압공의 설계 변경을 통해 보완할 수 있을 것으로 사료된다. 또한, GPS의 다중화 또는 RTK (Real Time Kinematics) 등의 장비를 활용한다면 더 높은 고도/위치 정확도를 얻을 수 있을 것이다. 본 시험발사의 최대 고도는 276 m로, 우주 환경에 대한 검증은 아직 한계로 남아있다. 하지만 대기권 내에서 운용되는 초소형 발사체의 경우, 이를 고려할 필요가 없으므로 Pixhawk 시스템의 도입을 통해 전체 시스템의 신뢰성과 확장성을 달성할 수 있으며, 비용적 효율성 또한 얻을 수 있을 것이다.
유사 분야의 선행연구[10]를 차용하여 별도의 MCU (Micro Controller Unit)와 MavROS를 통한 외부루프 알고리즘을 적용한다면, 보다 복잡한 임무 수행이 가능할 것으로 여겨지며, 발사체의 신뢰성 또한 확보할 수 있을 것이다. 이러한 방식으로 신뢰성이 보장된다면, 기상 측정 등 다양한 분야에서 초소형 발사체의 활용을 기대할 수 있을 것이다.
