

Nomenclature
1. 서 론
2. 본 문
2.1 시험장치
2.2 축소형 추력편향 노즐 형상 및 시험조건
3. 실험결과 및 분석
3.1 유동 특성
3.2 추력 보정
3.3 추력 특성
3.4 노즐 편향 효율
4. 결 론
Nomenclature
UAV : unmanned aerial vehicle
UCAV : unmanned combat aerial vehicle
TVN : thrust vectoring nozzle
SLS : sea level static
L : length
W : width
H : height
NPR : nozzle pressure ratio
: geometric vector angle
: measured vector angle
Cd : mass flow coefficient
Cfg : gross thrust coefficient
: nozzle efficiency coefficient
NPRd : design nozzle pressure ratio
1. 서 론
천음속 무인 항공기의 경우 고속 정찰과 정밀 타격 임무를 수행하기 위해 천음속(transonic) 영역에서의 비행 능력이 요구된다. 천음속 영역은 마하수 0.8-1.2사이를 의미하며 초음속 경계를 넘나드는 특수한 환경으로, 축소 노즐 또는 축소-확대 노즐을 이용한 추진기관의 배기 유동과 추력 제어는 무인 항공기의 핵심 요소로 작용한다. 이러한 노즐은 추력 및 효율 극대화를 위해 대부분 노즐 목에서 초킹조건으로 작동되도록 설계된다. 초킹조건은 노즐 목에서 마하 1이 될 때 노즐을 통과하는 유량이 최대치가 되는 것이며, 유동 하류의 배압과 무관하고 상류의 압력 또는 온도의 상승에 의해서만 유량의 증가가 가능함을 의미한다. 따라서 천음속 무인 항공기의 배기노즐의 유동은 마하 1 근처에서 작동되며, 초음속의 경계에서 아음속 유동과 초음속 유동의 혼합, 충격파 또는 팽창파 등이 발생하는 복잡한 특성을 가지게 된다. 이때 팽창파는 노즐 출구 모서리 부분에서 발생하게 되며, 충격파는 초음속과 아음속의 혼합에 의한 복잡한 상호작용의 결과로 나타나게 된다. 또한, 배기노즐은 엔진에서 발생한 고온·고압의 가스를 효율적으로 가속시켜 추력으로 전환하는 핵심 장치로, 유동의 방향성과 속도를 정밀하게 제어함으로써 기체의 기동 성능과 임무 수행 능력에 직접적인 영향을 미친다. 이에 따라, 해당 운용조건에 적합한 노즐 설계가 필수적이다. 이와 더불어 차세대 항공기에서 고기동성(high maneuverability), 생존성(survivability)향상을 위해 추력편향 기술의 사용이 주목받고 있다. 추력편향 기술 적용 시 꼬리날개 제거가 가능하고 그 역할을 대신할 수 있어 스텔스성 향상, 항력과 무게 감소 측면에서도 이점을 보인다[1,2,3]. 특히 수직꼬리날개가 제거된 UAV에서 요(yaw)방향으로의 추력편향 기술은 회전 제어와 고속 비행 시 기동성 및 비행 안정성을 유지하며, 공기역학적 조종면의 효율 저하를 극복하는 핵심기술로 주목받고 있다. 이러한 추력편향 기술은 기계역학적 방식과 유체역학적 방식으로 구분된다. 기계역학적 방식은 전투기 노즐의 형상을 기하학적으로 변형하여 배기 유동의 방향을 직접적으로 바꿔주는 방식이다. 반면, 유체역학적 방식은 고정된 노즐 구조를 유지하면서 보조 유동을 분사하여 배기 흐름의 방향을 제어하는 기법이다. 이러한 추력편향 기술은 F-22 Raptor와 X-45 UCAV를 비롯한 일부 전투기 및 무인 항공기에 적용되어 있다. F-22 Raptor는 이차원(two-dimensional)출구형상과 피치(pitch)방향 추력편향 기술이 적용된 노즐을 사용하였다. X-45 UCAV는 꼬리날개와 러더를 제거하고, 그 기능을 요방향 추력편향 노즐로 대체함으로써 기체의 기동성과 스텔스 성능을 동시에 향상시켰다.
Taylor[3]는 기계역학적 방식에 기반한 추력편향 기법을 활용하여 이차원 축소-확대 노즐(2-D convergent- divergent nozzle)에 대한 피치 및 요방향의 추력 및 유동 특성을 실험적으로 연구하였다. 연구 결과, 전반적으로 피치편향이 요편향보다 더 높은 효율을 나타냈으며, 이차원 형상의 노즐설계에서 내부 유동 특성이 성능에 큰 영향을 미치므로 정밀한 형상 설계가 필수적임을 강조하였다.
David 등[4]은 원뿔형 축소-확대 노즐(conical convertgent-divergent nozzle)에서 방출되는 초음속 유동 구조를 실험 및 LES 시뮬레이션, PIV, Shadowgraph을 통해 분석하였다. 설계된 노즐은 노즐 립(lip)과 목(throat)에서 충격파 다이아몬드(shock diamond)가 형성되어 노즐 출구 유동에서는 이중 다이아몬드 패턴(double diamond structure)이 나타나는 것을 확인하였다.
유두환 등[5]은 피치방향 편향 각 및 피치 플랩 길이(Lpitch) 변화에 따른 이차원 축소-확대 노즐의 추력편향 특성을 실험적으로 연구하였다. 실험 결과, 피치 플랩 길이가 노즐 출구 높이 길이의 1.5배의 값을 가질 때 가장 효과적인 추력편향 성능이 나타남을 제시하였다.
김윤희 등[6]은 초음속 항공기 비행조건을 바탕으로 2차원 추력편향 노즐을 설계하고, 피치 플랩 힌지 위치와 편향 각이 유동 특성 및 추력 성능에 미치는 영향을 분석하였다. 그 결과 피치 플랩의 힌지 위치가 노즐 출구에 가까울수록 노즐 내부의 유동 간섭이 줄어들어 추력 손실이 감소함을 입증하였다. 또한 동일한 힌지 위치에서 편향 수행 시 노즐 내부 윗면과 아랫면의 압력분포 차이로 인해 추력 손실이 발생함을 확인하였다.
국내외적으로 초음속 영역에서 적용되는 추력편향 기법에 대한 연구는 활발히 진행되어 왔다. 그러나 무인 항공기 등이 주로 운용되는 천음속 영역에서의 추력편향 기술, 특히 요방향 추력편향 노즐에 대한 연구는 상술한 바와 같이 천음속 노즐 유동의 복잡성 등으로 실험적 연구가 필수적인 상황이나 상대적으로 연구가 부족한 실정이다.
따라서 본 연구에서는 천음속 영역에서 운용되는 무인 항공기 엔진에 적용가능한 요 방향 추력편향 노즐 특성을 이해하기 위한 실험연구를 수행하고자 한다. 이를 위해 초음속 풍동 시험장치를 구성하였으며 설계된 노즐에 대해 추력 및 공력특성을 분석하고 주요 설계변수에 대한 영향을 검증하였다.
2. 본 문
2.1 시험장치
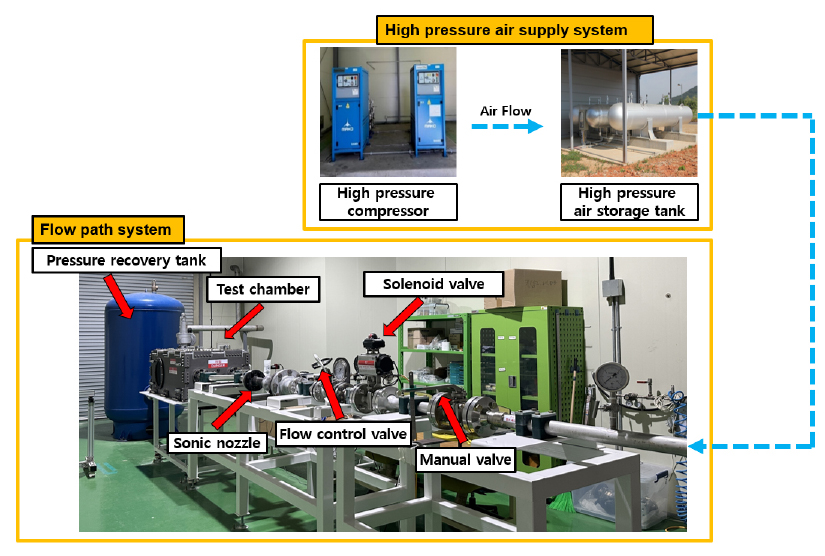
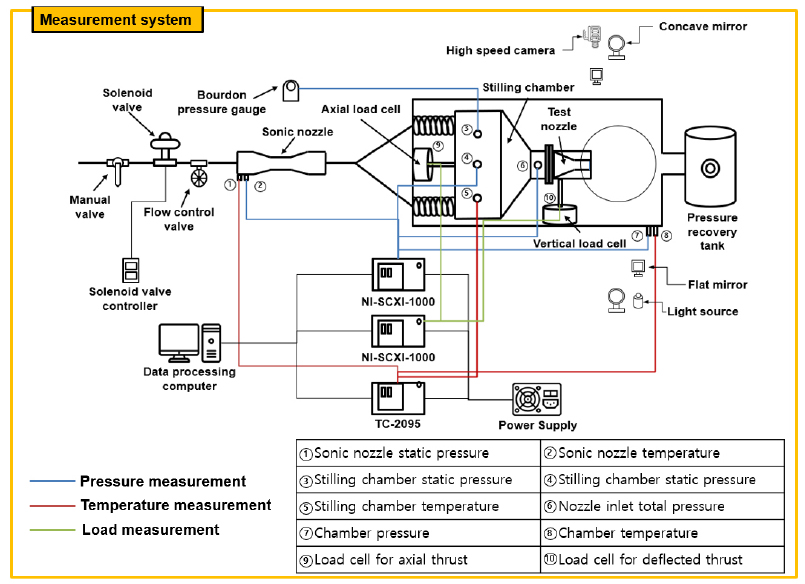
추력편향 노즐 기술개발 필요에 따라 이를 시험 평가할 수 있는 초음속 풍동 시험장치를 구축하였다. 본 시험장치는 노즐 입구의 압력 및 유량 조건을 만족시키기 위한 고압 공기공급 시스템, 공기 유량 조정 및 노즐 시험부, 시험장치에 공급된 공기를 대기로 배출시키는 과정을 수행하는 배기 시스템으로 구성되어 있다. Fig. 1에 시험장치의 레이아웃이 제시되어 있다. 시험장치는 고압 압축기, 고압 공기 저장탱크, 고압 밸브, 수동 밸브, 솔레노이드 밸브, 유량조절 밸브, 소닉노즐, 테스트 챔버, 리시브 탱크로 구성된다. Fig. 2에 제시된 계측시스템은 크게 추력, 압력, 온도 데이터 획득 시스템과 제트유동 가시화 시스템으로 구성되어 있다.
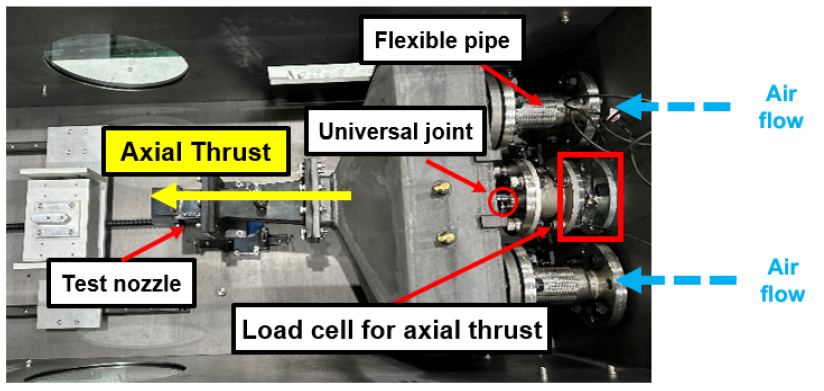
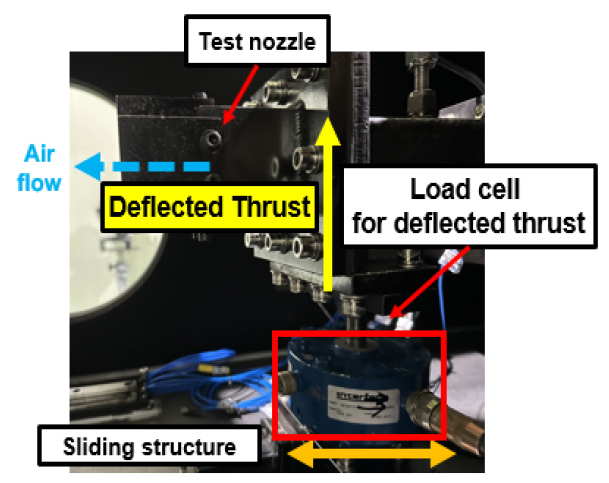
추력편향 시 추력은 축 방향 추력과 편향 방향 추력으로 분해되며, 축 및 편향 방향 추력 계측을 위한 2개의 로드셀이 테스트 챔버 내부에 위치해 있다. 축 방향 추력 측정을 위해 플렉시블 파이프 사이에 축 방향 로드셀(CAS Korea DSCS Series, Max. force 1,000 kgf, 1 Axis)을 설치하였으며 편향 방향 힘에 대해 자유도를 부여하기 위해 축 방향 로드셀과 스틸링 챔버의 연결부를 유니버설조인트(universal joint)로 처리하였다. 축 방향 로드셀의 정격출력은 3.0 mV/V ± 0.3%, 분해능은 ± 0.49 N, 측정값의 ± 0.04% 오차 범위를 가지고 있으며, Fig. 3에 설치 형상이 제시되어 있다. 편향 방향 추력은 시험 노즐 플랜지 하단에 다축 로드셀(Interface 5210 XYZ-1K, Max. force 1,000 lbf, Multi-Axis)을 장착하여 측정하였으며, 편향 방향 힘만을 측정하기 위해 슬라이딩 구조를 사용하여 축 방향으로 자유도를 가지게 하였다. 편향 방향 로드셀의 정격출력은 2.058 mV/V, 분해능은 ± 0.22 N, 측정값의 ± 0.06% 오차 범위를 가지고 있으며, Fig. 4에 설치 형상이 제시되어 있다.
공력데이터 획득을 위해 소닉노즐, 스틸링 챔버, 노즐 입구, 테스트 챔버 총 4개소에 나눠 4개의 압력센서와 3개의 온도센서를 설치하였다. 소닉노즐, 스틸링 챔버 및 노즐 입구에 설치된 압력센서는 SENSYS PSHB0050BCIG-FC(0–5 MPa)이며, 해당 센서의 분해능은 ± 500 Pa, 측정 불확도는 측정값의 ± 0.32%이다. 테스트 챔버에 설치된 압력센서는 SENSYS PTCD0200RCPA(0–200 kPa)이며, 센서의 분해능은 ± 25 Pa, 측정 불확도는 측정값의 ± 0.16%이다. 온도센서는 모두 동일한 K-type Thermocouple을 사용하였으며, 센서의 분해능은 ± 0.5°C, 상온에서의 불확도는 측정값의 ± 1.1°C이다.
소닉노즐은 벤츄리 타입의 유량계로 국제표준화기구(International Organization for Standardization, ISO)의 ISO 9300 : Measurement of Gas Flow by Means of Critical Flow Venturi Nozzle 규격에 맞추어 설계하였다. 한국표준과학연구원 교정 결과 설계 유량 대비 편차는 ± 0.05% 이내로 확인하였다. 소닉노즐에 위치한 압력 및 온도센서를 활용하여 유량이 계산되도록 하였다. 스틸링 챔버, 노즐 입구, 테스트 챔버 부분에서 측정된 공력 데이터는 공기 밀도, 노즐 출구 속도, 이론 추력 계산 시 활용하였다. 각 센서들의 출력은 전압 형태로 NI-SCXI-1000의 DAQ로 전송되며, Labview 소프트웨어를 사용하여 데이터를 수집하고 기록하였다.
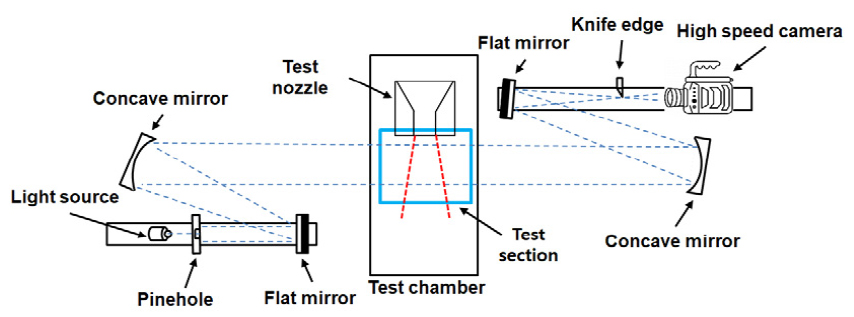
배기 노즐의 제트유동 가시화를 위해 쉴리렌(Schlieren) 기법을 사용하였다. 쉴리렌 기법은 빛의 굴절률 변화를 명암의 차로서 나타내는 광학적인 측정법이다. 쉴리렌 시스템은 광원, 평면거울, 유효입경 200 mm, 초점거리 2,000 mm를 가지는 오목거울, 핀 홀, Knife Edge, 고속 카메라(VEO410, Phantom)로 구성된다. 본 실험에서 적용된 쉴리렌 장치의 개념도를 Fig. 5에 제시하였다.
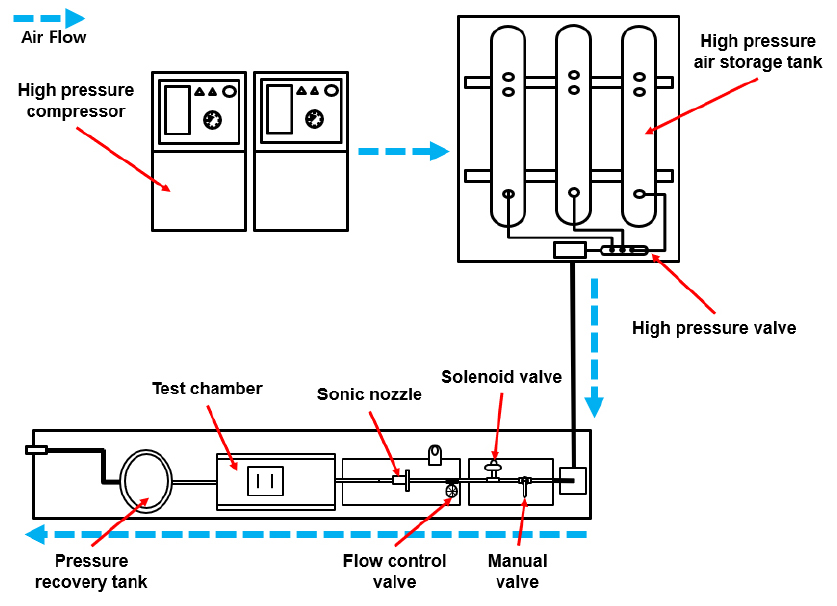
초음속 풍동시험 절차는 다음과 같다. 공기 압축기를 통해 생성된 압축공기는 고압 공기 저장탱크에 저장된다. 고압 밸브와 수동 밸브를 순차적으로 조작하여 유량을 조절한 뒤 솔레노이드 밸브를 작동하여 노즐 시험부에 공기유량을 공급한다. 솔레노이드 밸브를 통과한 고압 공기는 소닉노즐을 거쳐 스틸링 챔버에 도달한 뒤, 테스트 노즐을 통과하여 리시브 탱크를 지나 대기로 방출된다. Fig. 6에 공기흐름이 제시되어 있다. 설계된 초음속 풍동 장치는 성능검증 실험을 통해 노즐 압력비 12까지 안정적으로 운용가능함을 확인하였다. 상온에서 초음속 풍동 장치의 최대 질량유량은 1.98 kg/s, 출구 마하수는 2.30 정도이다.
2.2 축소형 추력편향 노즐 형상 및 시험조건
본 연구에서는 지상 정지 상태의 표준 해수면 조건에서 최대 출력 작동 조건을 설계점으로 하는 가상 엔진을 설정하였다. 이후 초음속 풍동장치에서 공급 가능한 공기유량을 감안하여 가상의 엔진 노즐 길이에 대하여 0.264의 스케일을 적용하여 실험용 축소형 노즐을 제작하였다. 축소형 추력편향 노즐 시험조건은 가상 엔진의 설계점을 기반으로 풍동시험에 맞게 변환 적용하였으며 설정된 시험조건을 Table 1에 제시하였다.
가상 엔진의 기본 형상과 주요 부품의 배치 및 위치 번호는 Fig. 7과 같으며 Fig. 8에 제작된 천이 덕트(transition duct)와 추력편향 노즐(Thrust Vectoring Nozzle, TVN)의 조립품의 모습이 제시되어 있다. Fig. 9는 조립품의 단면으로 내부 모습을 확인할 수 있다. 이때 위치번호 64번은 천이 덕트 입구, 7번은 축소-확대 노즐 입구, 8번은 노즐 목, 9번은 축소-확대 노즐 출구위치를 나타낸다. 천이 덕트는 초음속 노즐 엔진부품 번호체계에 따라 64 ~ 7번에 해당하는 부분으로 바이패스 흐름과 코어 흐름이 혼합된 후 노즐 입구로 이동하는 부분이다. 천이 덕트의 길이()는 105.6 mm로 일정한 단면적을 가지며 원형에서 직사각형으로 형상이 변하도록 하였다. TVN은 엔진부품 번호체계의 7 ~ 9번에 해당하는 부분으로 축소-확대 노즐로 축소부인 일차 플랩(primary flap)과 확대부인 이차 플랩(secondary flap)으로 구분된다. 편향 각 0°에서 노즐 목 면적()은 93.05 × 18.44 mm2이며, 노즐 목에서 초킹 이후 노즐 출구에서 초음속 유동을 완전 팽창시키기 위해 노즐 출구 면적 대 목 면적의 비()를 1.0029로 설정하였다. 이때, 노즐 출구 가로세로비()가 증가할수록 노즐 플룸의 온도가 감소하여 적외선 피탐성이 향상되나 추력은 감소한다. 본 연구에서는 최성만[8]의 연구에서 제시한 가로세로비 중 추력 감소율과 온도 감소율을 고려하여 가로 길이() 93.32 mm, 세로 길이() 18.44 mm를 가지는 가로세로비 5의 직사각형으로 설계하였다. 또한 노즐의 길이 대 폭 비는 노즐 축소부()의 경우 1.43, 확대부()의 경우 2.90으로 설정하였다. 노즐 입구에서 목까지의 길이()는 26.32 mm, 노즐 목에서 출구까지의 길이()는 53.46 mm이며 폭()은 18.44 mm로 동일하다. 이러한 형상은 이차 플랩이 특정 각도로 작동할 때 추력 벡터 각이 기하학적 편향 각과 유사하게 형성되는지 여부를 길이별 수치해석을 통해 최적의 길이 비를 선정한 결과이다. 설계된 축소형 노즐의 제원을 Fig. 10과 Table 2에 제시하였다.
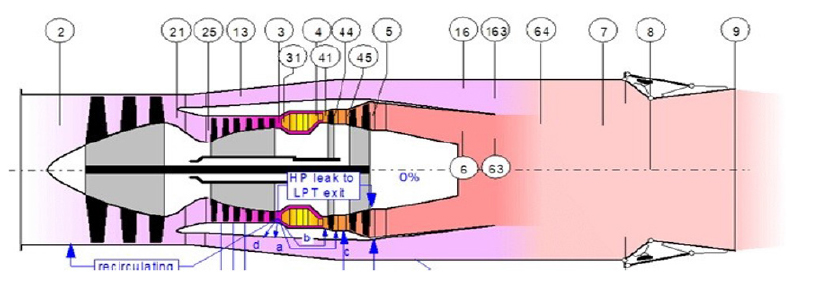
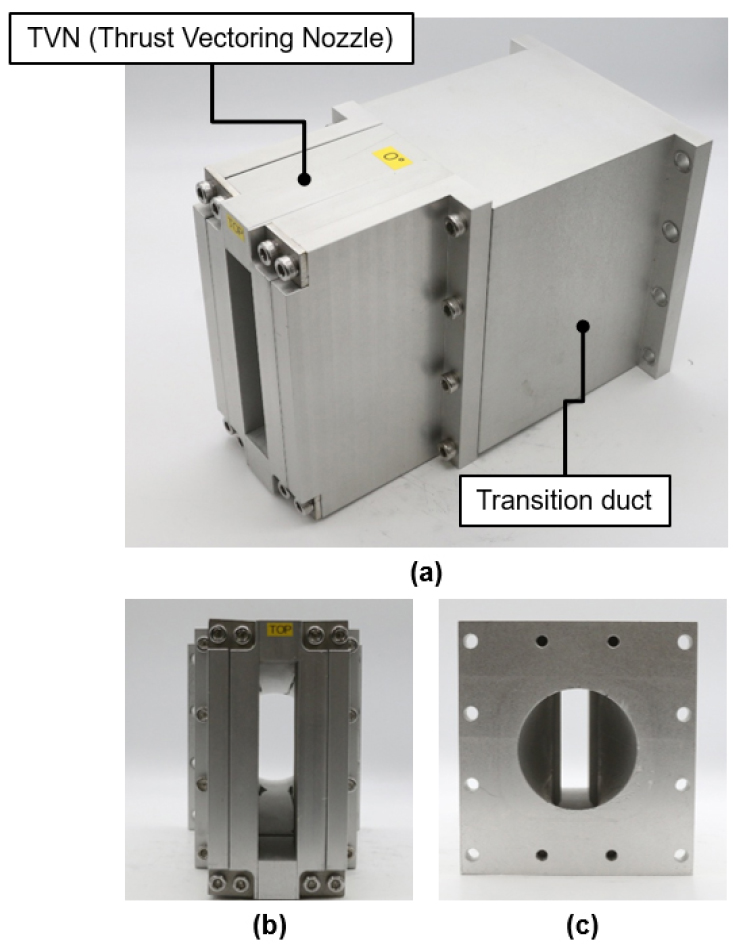
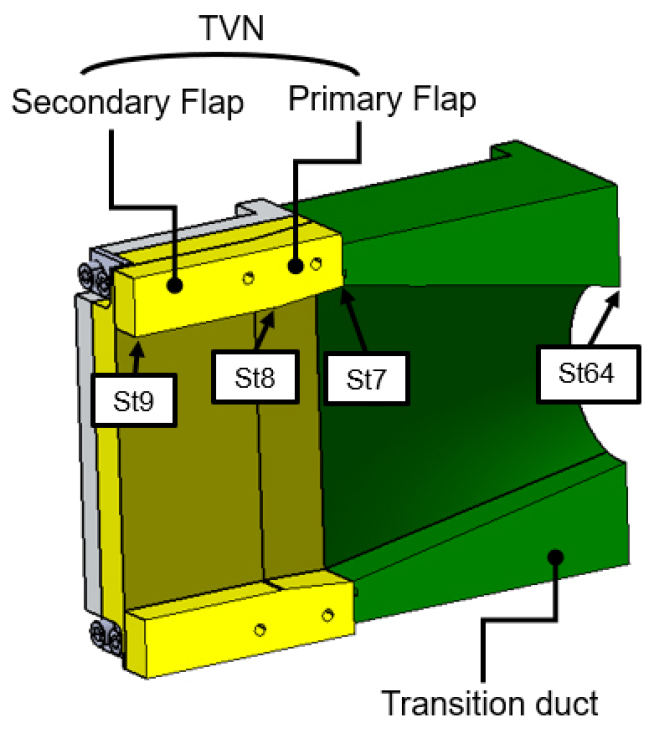
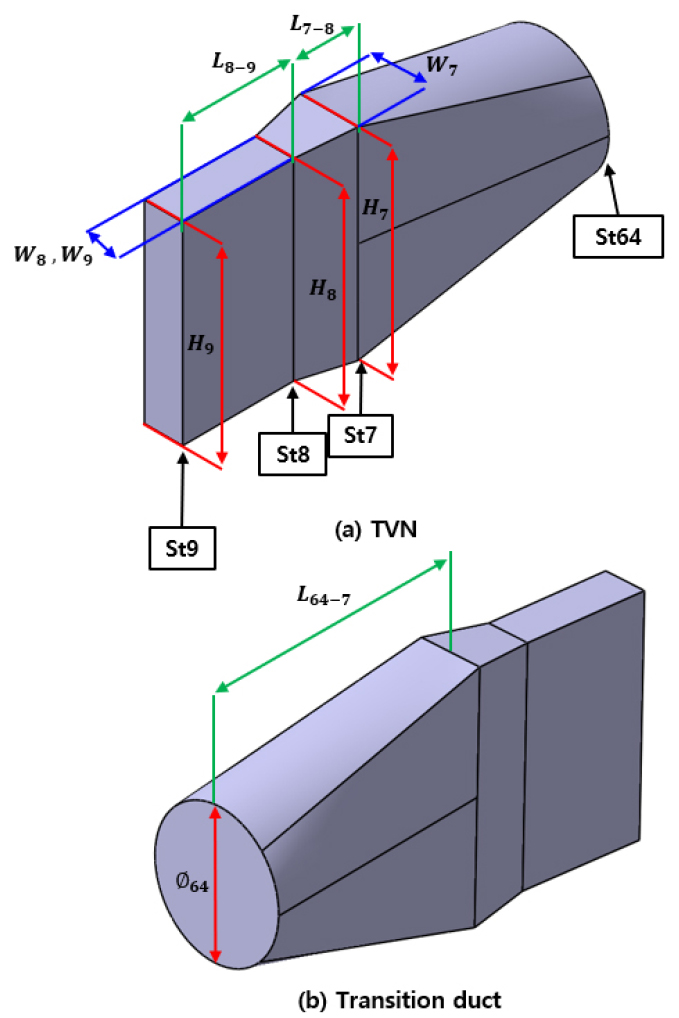
Table 2.
Dimension of transition duct and TVN assembly.
| Station | Length(mm) |
| 58.73 | |
| 97.52 | |
| 27.73 | |
| 93.05 | |
| 18.44 | |
| 93.32 | |
| 18.44 | |
| 105.6 | |
| 26.32 | |
| 53.46 |
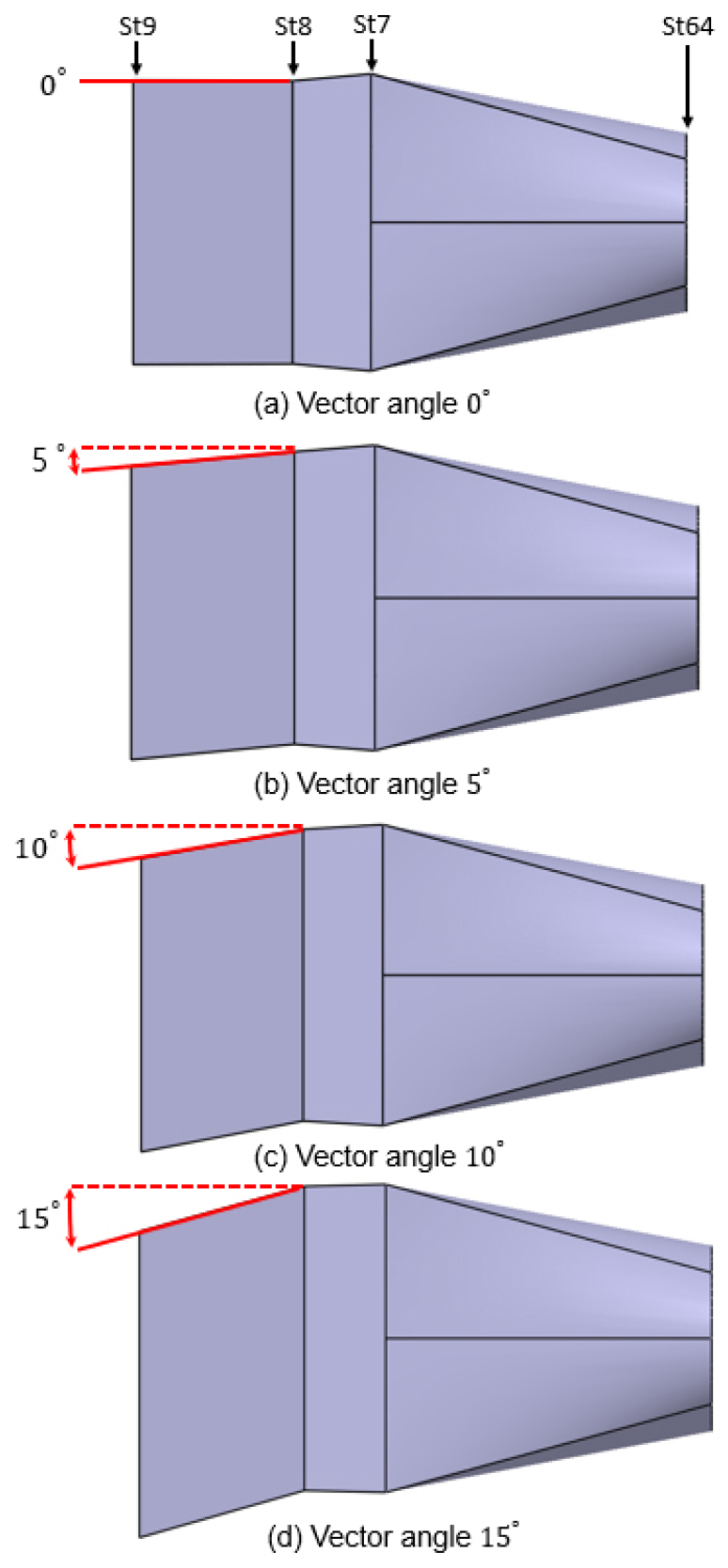
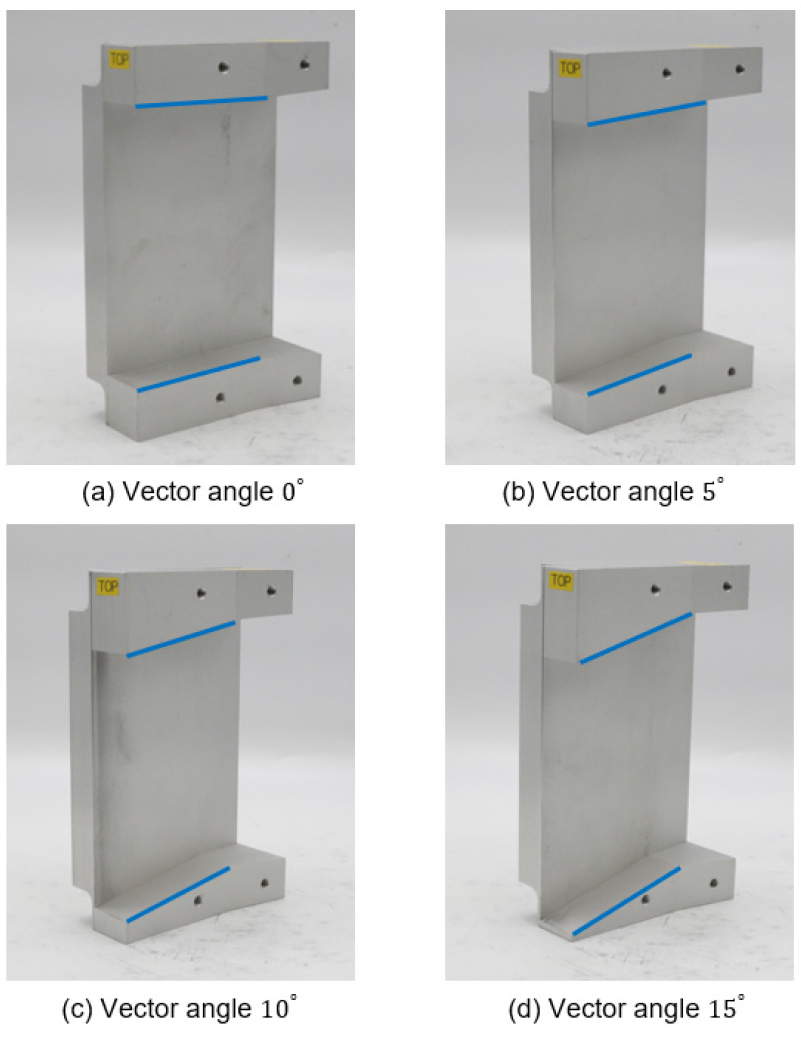
본 연구에서는 이차 플랩의 각도 조절을 통해 추력편향 개념을 적용하였으며, 적용된 요 방향 편향 각도는 0°, 5°, 10°, 15°이다. Fig. 11을 통해 편향 기동 시 플랩에 부여된 각도를 확인 할 수 있다. 초음속 풍동 시험 시 이차 플랩의 각도가 서로 다른 TVN을 제작하였으며 이를 교체하는 방식으로 기하학적 편향 각을 부여하였다. 다만, 초음속 풍동의 가시화 창 및 편향 방향 로드셀의 위치를 고려하여 노즐을 90° 회전시켜 실험을 진행하였다. 편향 각에 따라 제작된 TVN의 모습을 Fig. 12에 제시하였다.
3. 실험결과 및 분석
3.1 유동 특성
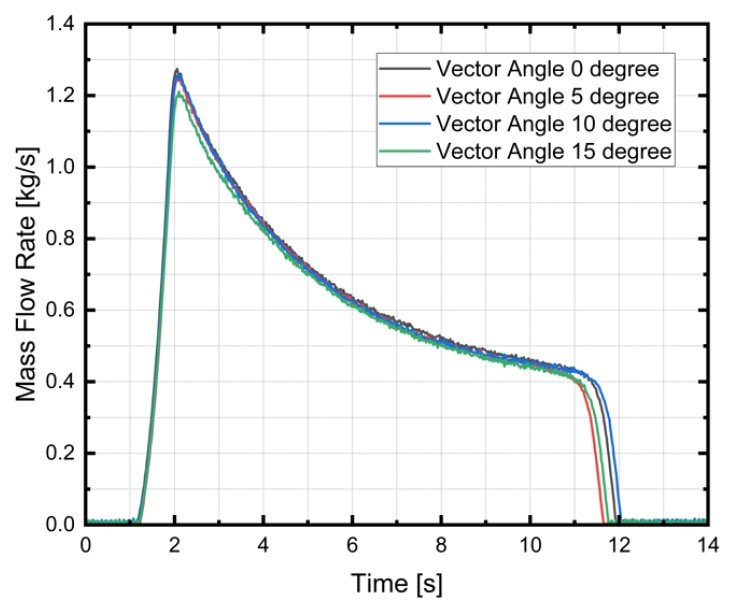
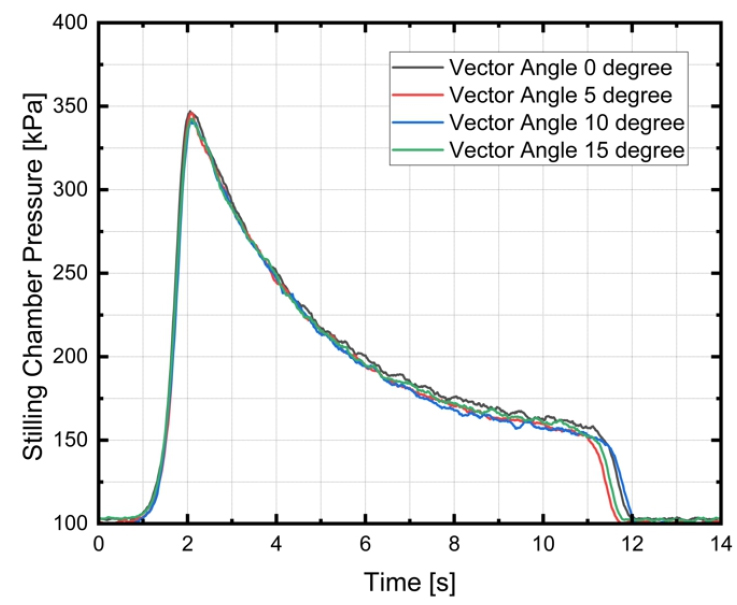
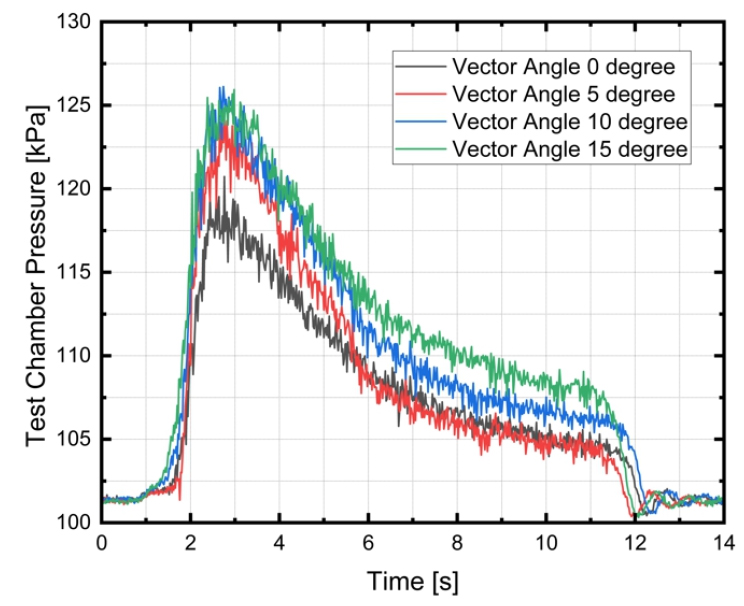
계측된 온도, 압력 데이터를 활용하여 추력편향 노즐의 유동 특성을 분석하였다. Fig. 13에 편향 각에 따른 시간 대 유량 그래프를 제시하였다. 공기유량은 최대 약 1.2 kg/s에 도달 후 시간이 경과함에 따라 서서히 감소하는 형태를 보인다. Fig. 14에 제시된 스틸링 챔버 압력의 경우 최대 3.5 bar까지 도달한 후 서서히 감소하는 형태로 시간에 따른 공기유량과 유사한 경향을 보인다. Fig. 15에 제시된 테스트 챔버 내의 압력은 편향 각에 따라 증가된다. 이는 유동의 편향에 따라 수평으로 배치된 배기파이프와 유동의 방향이 일치하지 않아 유동의 저항이 증가하여 발생하는 현상으로 판단된다. 본 연구에서 스틸링 챔버 압력()을 노즐 입구 압력()으로, 테스트 챔버 압력()을 배압()으로 설정하고, 두 압력의 비를 노즐 압력비(Nozzle Pressure Ratio, NPR)로 정의하였다. 이는 시험조건으로 설정한 노즐 압력비 2.0 및 유량 0.79 kg/s를 충분히 만족하는 범위 내에 해당하므로, 본 데이터를 바탕으로 분석을 진행하였다.
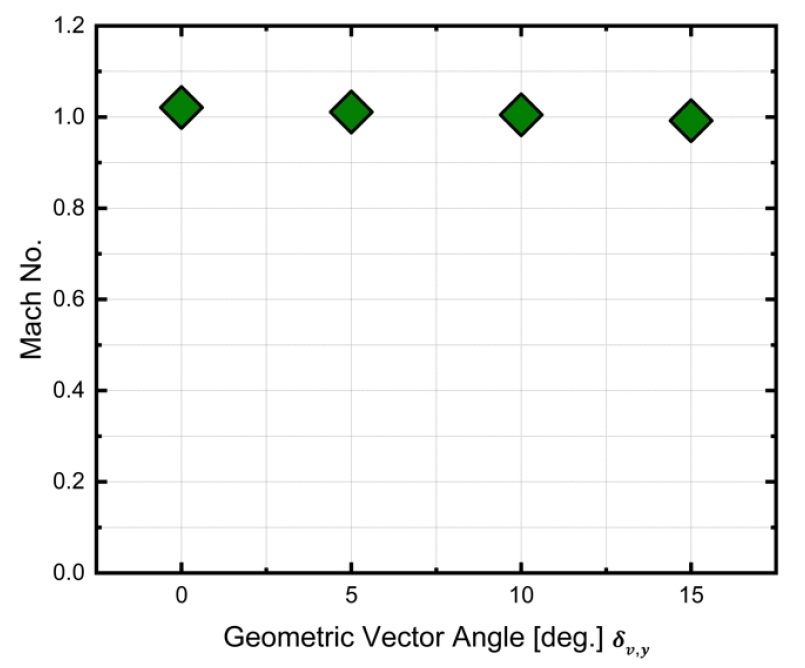
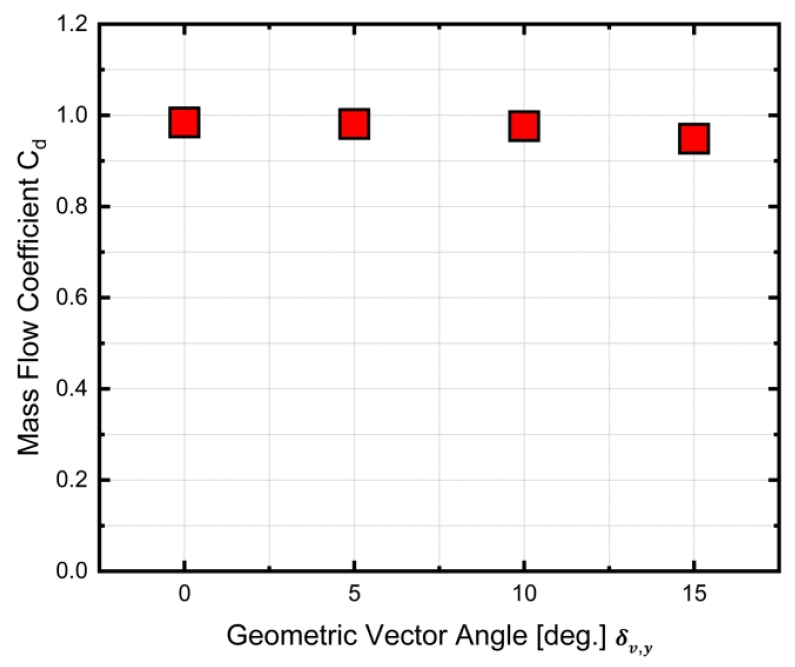
유통 특성을 파악하는데 있어 노즐 출구 마하수(Me)와 유량계수()는 우선적으로 확인되어야 하는 값이다. 노즐 출구 마하수는 Eq. 1에 제시된 관계식을 활용하여 계산하였다. 여기서 는 스틸링 챔버 전압력, 는 스틸링 챔버 전온도, P는 테스트 챔버 정압력, T는 테스트 챔버 정온도를 의미하며 는 공기의 비열비 1.4를 사용하였다. 계산 결과 노즐 출구 마하수는 Fig. 16에 나타낸 바와 같이 1 근처의 값을 가지며 편향 각이 증가될 경우 감소하는 경향을 보인다. 유량계수는 Eq. 2와 같이 실험을 통해 측정된 유량과 이상적인 유량의 비로 정의하였다. 유량계수도 마찬가지로 편향 각이 증가함에 따라 0.98에서 0.94로 감소하는 경향을 보이며 편향 각에 따른 유랑계수를 Fig. 17에 제시하였다. Taylor[3]의 실험에서 이차원 노즐에 대해 편향 각 0°에서 약 0.98의 유량계수가 측정되었다.
쉴리렌 가시화 이미지를 통해서 유동특성을 파악하였다. Fig. 18은 기하학적 편향 각 10°에서 노즐 압력비 증가에 따른 유동 형성 과정을 보여주는 사진이다. Fig. 18(c)를 통해 노즐 압력비 2.0의 경우 노즐 출구 부근에서 수직 충격파(normal shock)가 형성됨을 확인할 수 있다. 이때 노즐 출구 마하수는 약 1.02이다. 점차 노즐 압력비가 2.5로 증가함에 따라 노즐 출구 마하수도 1.2 정도로 상승하고, 노즐 끝단 부근에서 경사 충격파(oblique shock)가 생성되는 것을 Fig. 18(d)를 통해 확인 할 수 있다.
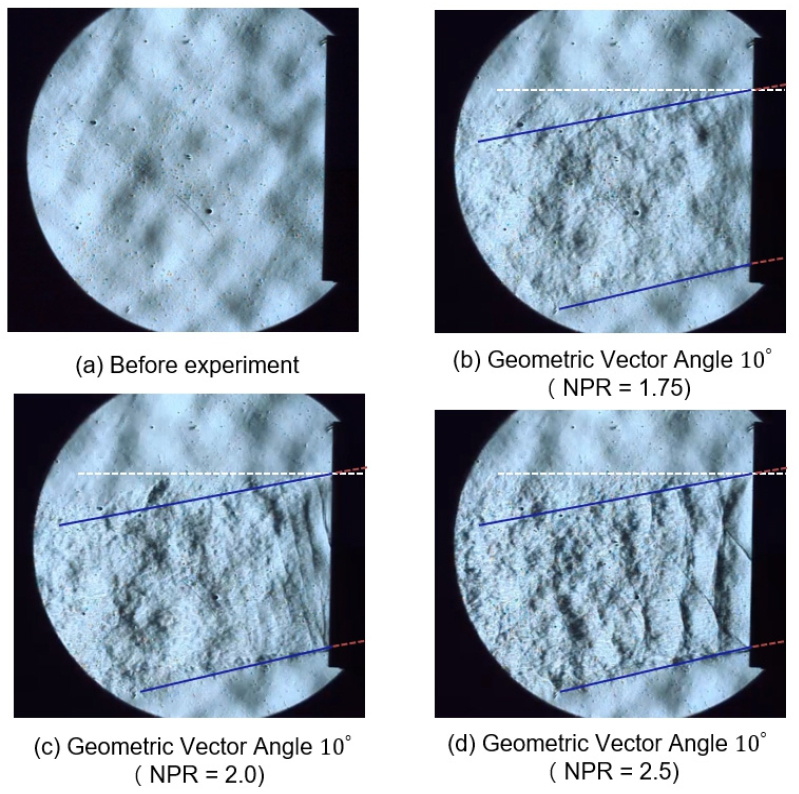
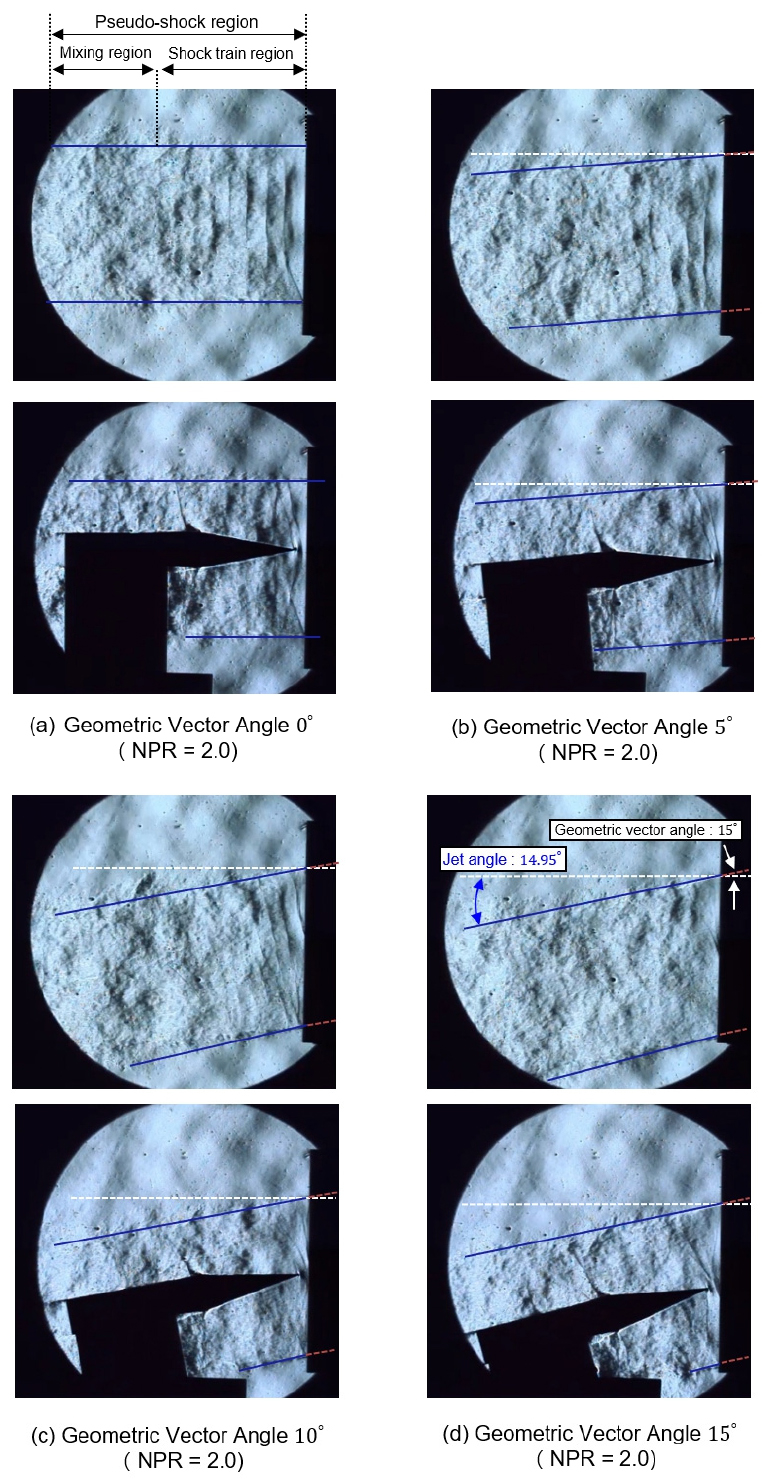
Fig. 19에 노즐 압력비 2.0 지점에서 편향 각에 따른 유동 가시화 이미지를 제시하였다. Fig. 19(a) 사진을 보면 여러 개의 수직 충격파가 일정 간격으로 배열 되에 있는 충격열(shock train region)구조를 확인할 수 있다. 각 충격파를 통과하며 유동의 정압, 온도, 밀도는 급격히 증가하고 유속은 감소한다. 그러나 전체 유동은 하나의 강력한 충격파 대신 다단 충격파 구조를 통해 점진적인 압력 상승과 감속 과정이 이루어진다. 수직 충격파가 반복적으로 발생하는 위치 이후에 유동이 점차 혼탁해지며 난류로 변화하는 혼합 영역(mixing region)이 존재한다[9]. 기하학적 편향 각에 따라 유동의 편향이 적절히 발생했는지 확인하기 위해 제트 편향 각을 측정하였으며 측정 결과 기하학적 편향 각 15°에 대해서 제트 편향 각은 14.95°로 측정되어 편향은 적절히 이루어짐 확인하였다.
3.2 추력 보정
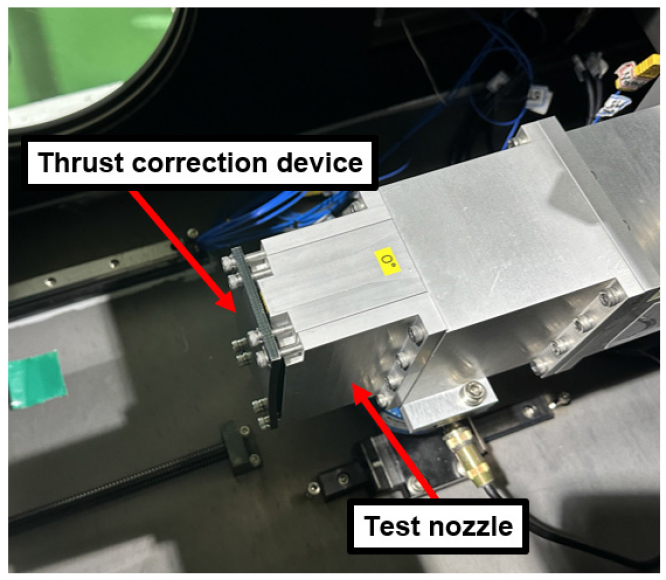
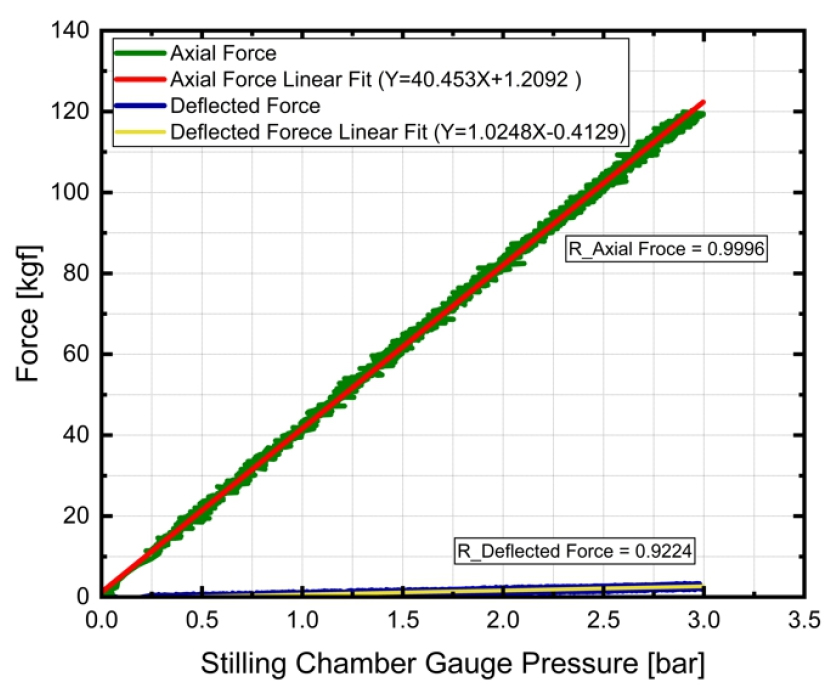
로드셀로 측정된 추력에는 제트 추력 외에도 고압 공기 공급 시 플렉시블 파이프가 압력에 의해 팽창하면서 발생하는 힘이 포함된다. 따라서 순 추력을 얻기 위해서는 측정된 추력에서 이러한 팽창력을 감해 주어야 한다. 이를 위해 노즐 입구를 폐쇄한 상태에서 스틸링 챔버에 압력을 가하고, 로드셀에 작용하는 힘을 측정하였다. 추력 보정장치가 설치된 노즐의 모습은 Fig. 20에 스틸링 챔버 압력에 따른 플렉시블 파이프의 팽창력 보정식은 Fig. 21에 각각 제시하였다. 이때 축 방향 추력 상관계수(R)는 0.9996이며, 편향 추력 상관계수(R)는 0.9224이다.
3.3 추력 특성
로드셀을 이용한 추력 측정 시 신뢰도 평가를 위하여 편향 각 15°에서 3회의 반복 실험을 수행하였으며, 축 방향 및 편향 추력에 대한 신뢰도 평가 결과가 Table 3과 4에 각각 제시되어 있다. 신뢰도 평가 결과 축 방향 추력의 표준편차는 2.05 N, 95% 신뢰도에서 신뢰구간은 ± 5.09 N이며, 편향 방향 추력의 표준편차는 0.59 N, 95% 신뢰도에서 신뢰구간은 ± 2.54 N이다.
Table 3.
Reliability evaluation of axial thrust at geometric vector angle 15°.
| Number of tests | 1 | 2 | 3 |
| Axial thrust (N) | 150.16 | 152.13 | 154.26 |
| Mean thrust (N) | 152.18 | ||
| Standard deviation (N) | 2.05 | ||
|
Confidence interval (N, 95% Confidence level) | 5.09 | ||
Table 4.
Reliability evaluation of deflected thrust at geometric vector angle 15°.
| Number of tests | 1 | 2 | 3 |
| Deflected thrust (N) | 45.29 | 44.00 | 42.01 |
| Mean thrust (N) | 42.86 | ||
| Standard deviation (N) | 0.59 | ||
|
Confidence interval (N, 95% Confidence level) | 2.54 | ||
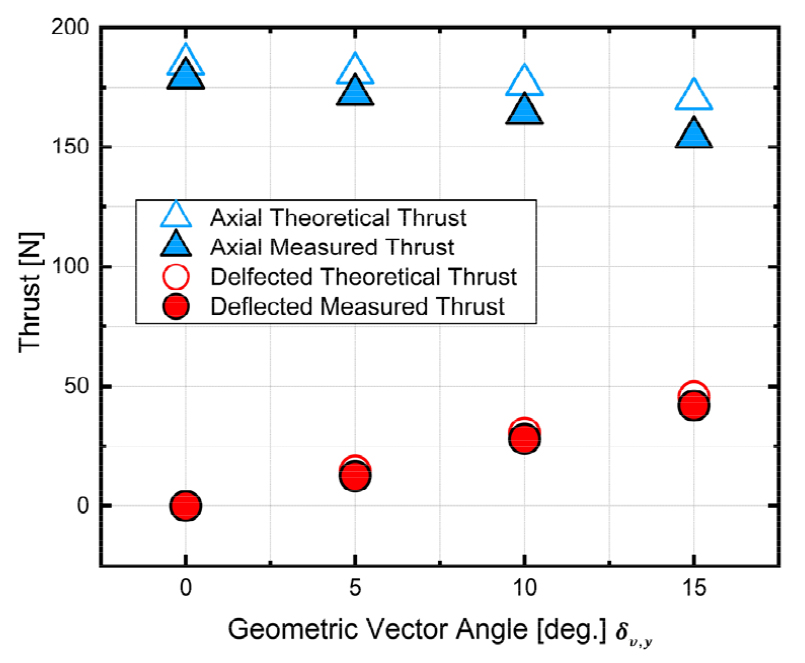
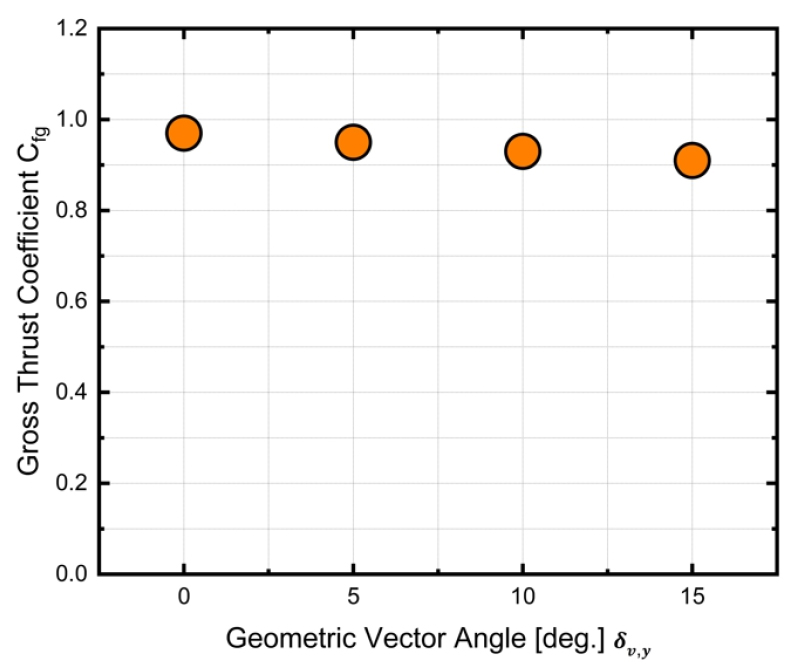
노즐 압력비 2.0인 지점에서 로드셀로 측정된 측정 추력과 Eq. 3의 추력 방정식에 기반하여 1차원으로 계산된 이론 추력을 비교하였다. 여기서 은 노즐 출구에서의 유량, 는 노즐 배기속도 는 노즐에 유입되는 공기속도이다. 그리고 는 노즐 출구면적, 는 노즐 출구 정압력, 는 대기 정압력을 각각 나타낸다. 총 추력(gross thrust)은 Eq. 4와 같이 축 방향 추력과 편향 방향 추력을 합으로 정의하였다. Fig. 22는 편향 각에 따른 추력을 나타내고 있다. 편향 각 증가에 따라 측정된 축 방향 추력은 179.0 N에서 편향 각이 5°, 10°, 15°인 경우 171.9 N, 164.1 N, 154.1 N으로 감소하고 편향 추력은 편향 각이 5°, 10°, 15°인 경우 12.5 N, 27.9 N, 42.0 N으로 점차 증가하는 경향을 보인다. 총 추력은 편향 각이 0°에서 15°로 증가할 때, 179.0 N에서 159.8 N으로 감소하였으며 약 11%의 추력 손실이 발생하는 것으로 확인되었다. 제트유동 가시화 이미지를 통해 편향 각 0°일 때는 상하 대칭을 이루는 균일한 유동이 생성되는 반면, 편향 각 존재 시 노즐 센터라인을 중심으로 유동이 비대칭인 형상을 띄는 것을 확인 할 수 있다. 이로 인해 상하의 압력 불균형이 발생하고, 노즐 출구에서는 압력회복을 위한 복잡한 외부 유동이 형성되는 것이다. 이러한 유동 변화는 노즐 출구 배기속도 및 유량이 감소로 이어지며 결과적으로 추력 손실을 유발한 것으로 판단된다. 추력계수()는 이론 추력과 측정 추력의 비로 정의하였으며 Fig. 23에 제시하였다. 편향 각이 증가할수록 0.97에서 0.91로 감소하는 경향을 보이지만 모두 0.9이상의 값을 가진다.
이창욱 등[10]이 수행한 수치해석을 통한 노즐 추력 성능 분석에서도 추력편향의 경우 압력에너지가 손실되고 유동 속도 및 유량 감소를 추력 손실의 원인으로 제시하였다. Scott 등[11]은 F-18 모델을 활용하여 피치 방향 추력편향 노즐을 대상으로 실험을 진행하였다. 실험 결과 노즐 압력비 4, 편향 각 20° 조건에서 총 추력 대비 약 16%의 편향 추력을 가지며, 추력편향 시 총 추력의 손실이 불가피하게 수반됨을 확인하였다.
3.4 노즐 편향 효율
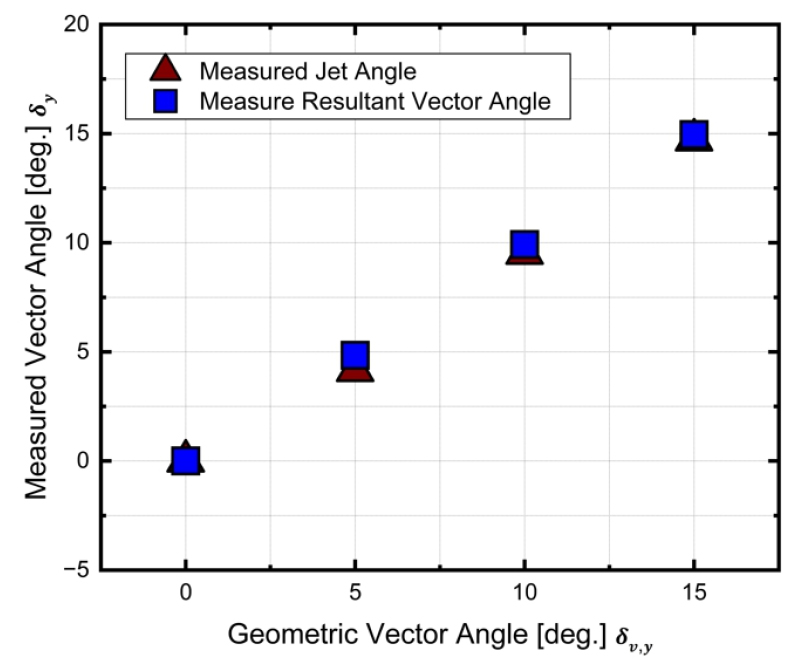
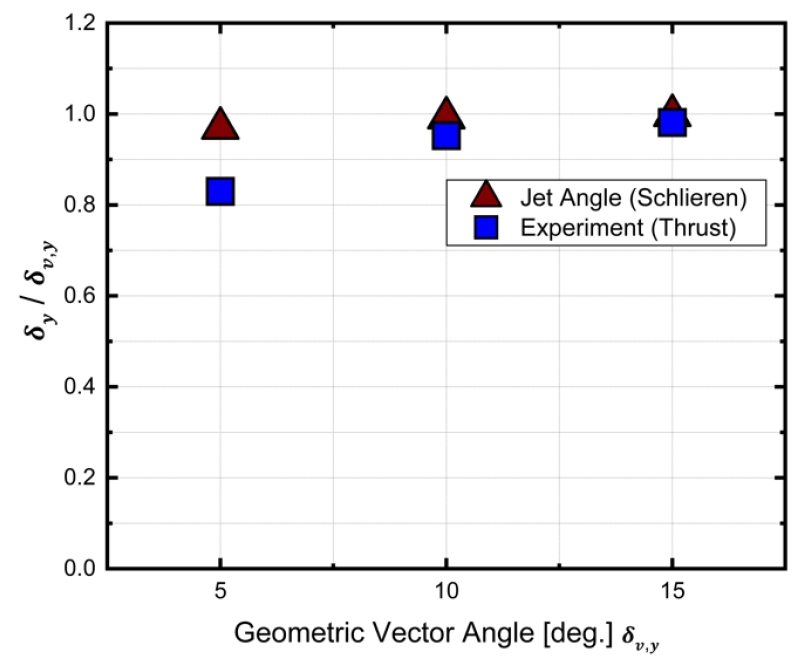
노즐 편향 효율은 설계된 추력편향 노즐이 부여된 기하학적 편향 각을 통해 얼마나 정확하게 구현하였는지를 정량적으로 평가하는 지표이다. 노즐 편향 효율을 도출하기 위해 먼저 편향 각을 측정하였다. 편향 각도는 제트유동 이미지를 통한 제트 편향 각 측정과 총 추력에서 편향 추력이 차지하는 비율을 이용하여 구할 수 있다. 제트유동 이미지를 통한 측정된 편향 각을 Measured jet angle로, 추력 측정을 통해 계산된 편향 각을 Measured resultant vector angle로 정의하였다. 편향 각에 따라 두 가지 방식으로 측정된 편향 각을 Fig. 24에 제시하였다. 측정된 편향 각을 기하학적으로 부여된 편향 각과 비교하였으며, 이를 통해 노즐 편향 효율 계수()을 Eq. 7과 같이 계산하였으며, Fig. 25에 결과값을 그래프로 제시하였다. 추력 측정을 통해 산출된 노즐 편향 효율 계수는 편향 각이 5°에서 15°로 증가함에 따라 0.83에서 0.98로 증가하는 경향을 보였으며, 제트유동에 기반한 노즐 효율 계수는 위와 유사한 경향을 보인다. 이와 같은 결과는 본 연구를 통해 설계된 추력편향 노즐이 기하학적으로 설정된 편향 각에 따라 편향 추력이 적절하게 추종하고 있음을 보여준다. 편향 각이 작은 경우에는 유동의 수평 방향 운동량 성분이 상대적으로 크게 작용하여 전체 운동량이 편향 방향 운동량으로 충분히 전환되지 못하지만, 편향 각이 증가할수록 유동이 보다 명확하게 편향 방향으로 전환되어 효율이 향상되는 것으로 판단된다.
Taylor[3]의 연구에서도 이와 유사한 경향이 확인된다. 피치 방향으로 19.5° 편향된 조건에서 요 플랩 길이와 힌지 위치를 유지한 채 요 플랩의 편향 각을 변수로 설정하여 실험한 결과, 설계 노즐 압력비(NPRd) 3.5 조건에서 편향 각 20°일 때 노즐 편향 효율은 55%였으며, 편향 각을 30°로 증가시켰을 때 효율은 60%로 향상되었다. 이러한 결과는 편향 각이 존재할 경우 노즐 내부의 유효 목(effective throat)이 하류로 이동하면서 목 단면이 중심선에 대해 비뚤어짐(skewed) 현상이 발생하고, 그 결과 기하학적 목(geometric throat)에서는 여전히 아음속 유동이 존재하여 결과적으로 더 높은 편향 효율을 보인다고 제시하였다.
4. 결 론
초음속 풍동 시험장치를 활용하여 천음속 항공기 엔진 추력편향 노즐의 요 방향 편향에 따른 유동 및 추력 특성에 대한 연구를 수행하였다. 시험장치는 고압 공기공급 시스템, 공기유량조정 및 노즐 시험부, 시험장치에 공급된 공기를 대기로 배출시키는 과정을 수행하는 배기시스템, 계측시스템으로 구성하였다. 계측시스템은 추력, 유동의 압력, 온도를 측정할 수 있도록 구성하였으며, 축 방향 및 편향 추력, 노즐 출구 마하수, 유량계수, 노즐 편향 효율 계수 등의 노즐 성능 지표를 산출하였다. 또한 쉴리렌 기법을 활용해 유동 가시화를 수행하였으며, 편향 각에 따른 유동의 흐름방향과 수직 충격파의 형성 등을 확인할 수 있었다. 추력편향은 이차 플랩을 통해 구현하였으며 편향 각도는 0°, 5°, 10°, 15°로 총 4가지를 사용하였다.
노즐 압력비 2.0인 지점에서 노즐 출구 마하수와 유량계수는 편향 각이 증가함에 따라 점차 감소하는 경향을 보인다. 편향 방향 추력은 편향 각이 15°로 증가할수록 점차 증가하지만, 축 방향 추력은 점차 감소되어, 총 추력은 약 11% 정도 감소하였다. 이때 추력계수는 편향 각이 15°로 증가할수록 0.97에서 0.91로 감소하는 경향을 나타내었다.
추력 측정을 통해 산출된 노즐 편향 효율 계수는 편향 각이 5°에서 15°로 증가함에 따라 0.83에서 0.98로 증가하는 경향을 보였으며, 제트유동에 기반한 노즐 효율 계수도 유사한 경향을 보였다. 즉 노즐의 기하학적 편향 각을 15°로 인가할 경우 추력편향 각은 14.72°로 산출되며, 이때 노즐 효율은 98%로 나타난다. 따라서 본 연구에서 설계된 축소형 추력편향 배기노즐이 노즐 압력비 2.0 운용조건에서 효과적으로 추력편향이 이루어짐을 확인 할 수 있었다.
추후 수치해석 연구를 통해 상세한 추력편향 노즐의 성능특성을 분석하는 연구를 수행할 예정이다.
