

Nomenclature
1. 서 론
2. 해석 모델 및 조건
2.1 노즐-01 모델(NZ-01)
2.2 노즐-02 모델(NZ-02)
2.3 노즐-03 모델(NZ-03)
2.4 수치해석 방법
3. 노즐 유동 해석 결과
3.1 노즐-01에 대한 해석 결과
3.2 노즐-02에 대한 해석 결과
3.3 노즐-03에 대한 해석 결과
4. 결 론
Nomenclature
H : height of a nozzle exit or throat
h : height ratio of a tab to nozzle throat
M : Mach number
NPR : Nozzle Pressure Ratio
p : pressure
S : shadowing of a tab, t/H
s : throat height of a secondary nozzle
t : tab height
δ : thrust deflection angle
Λ : angle of a tab
1. 서 론
추력벡터제어(Thrust Vector Control, TVC) 기술은 엔진에서 생성된 추력의 방향과 크기를 제어하여 항공기의 방향과 속도를 제어하는 기술이다. 속도가 느려 기동을 위한 공기역학적 힘이 부족한 초기 기동 또는 발사 단계에서 추력벡터제어는 매우 유용할 수 있다. 기존의 로켓보다 저렴하고 효율적인 재사용 로켓 개발에 기여할 수 있으며, 무인 항공기(Unmanned Aerial Vehicle, UAV)와 같은 분야에도 적용하여 감시, 수색 및 구조 등 다양한 임무를 수행하는데 기여할 수 있다. 이와 같이 추력벡터제어는 새로운 항공우주 비행체 개발뿐만 아니라 다양한 항공우주 산업에 유용하게 사용될 수 있을 것이다.
추력벡터제어를 통해 비행체의 안정성, 기동성, 조종성 등을 향상시킬 수 있다. 비행체의 제어 성능을 확보하기 위해서는 정밀하고 신뢰성 있는 복잡한 시스템이 필요하다. 이 같은 어려움을 해소하고 제어의 효율성과 활용성을 높이기 위해 새로운 방법들이 연구되었다[1,2,3,4,5,6,7,8,9,10,11].
추력벡터제어 기술은 크게 기계역학적 추력벡터제어(Mechanical Thrust Vector Control, MTVC) 기술과 유체역학적 추력벡터제어(Fluidic Thrust Vector Control, FTVC) 기술로 나눌 수 있다(Fig. 1). 기계역학적 추력벡터제어 기술은 확산 노즐에 탭(tab)과 베인(vane)을 장착하거나, 혹은 확산 노즐 끝단에 힌지된 플랩(flap)을 직접적으로 편향시켜 추력편향을 유도하는 방식이다. 유체역학적 추력벡터제어 기술은 노즐 목 혹은 확산 노즐에서 이차 유동(secondary flow)을 주입하여 유동 방향을 전환하는 방식으로, SVC(Shock Vector Control), TS(Throat Shifting) 및 Counterflow/Coflow 방법 등이 연구되고 있다.
확산 노즐의 고속 열유동장 내에 탭이나 베인을 사용하는 경우에 탭과 베인 재질의 높은 열적 내구성이 요구된다. 또한, 이러한 장치가 유동장 내에 계속 남아있으면 추가적인 유동 손실이 발생할 수 있다. 또한, 움직이는 기계 부품 수가 증가할 때 임계제어속도(critical control speed)가 감소할 수 있다. 이 같은 문제점을 극복하기 위해 1990년대 중반부터 미국 NASA[13]를 중심으로 단순 구조를 갖는 유체역학적 추력벡터제어 기술이 연구되었다. 주노즐 상하에 주노즐 유동과 반대로 흐르는 이차 흡입유동을 발생시켜 해당 방향으로 편향을 유도하는 대항류(counterflow) 추력편향제어 기술로서, 이차 흡입유동에 따른 모멘텀 손실, 추가동력의 필요 및 특정 운용조건에서 유동방향의 이력현상(hysteresis phenomena) 등의 단점을 보였다[6,8]. 이 같은 문제를 해결하기 위해, 주노즐 유동과 같은 방향의 이차 유동을 분출시켜 편향을 유도하는 동축류(coflow) 추력편향제어 기술이 제시되었다[14,15,16]. 코안다 효과로 날개의 양력을 증가시키기 위한 플랩[17]을 코안다 플랩이라고 한다. 위 선행연구는 추력편향각이 더욱 증가될 수 있게 노즐 확대부를 큰 원호 형상의 코안대 플랩으로 구성하였다. 또한, 비례제어밸브를 활용하고 예측 변수(predictor)를 설정하여 추력편향각의 이력현상(0 또는 약 70°)을 회피하기 위한 기술이 연구되었다[16].
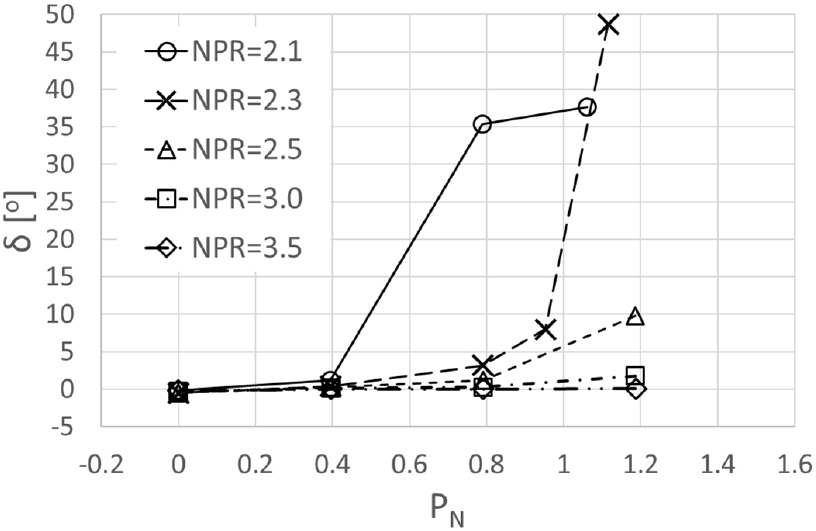
선행연구들에서 동축류 유체역학적 추력벡터제어 기술은 큰 추력편향각을 보여주었다. 하지만, 노즐 입출구 압력비(NPR)가 낮고 좁은 압력비 범위 내에서만 가능했다(Fig. 2). 즉 이 같은 기술의 문제점은 넓은 범위에서 안정적 및 효과적 제어를 기대하기 어렵다는 것이다.
본 연구에서는 노즐 목과 확산부의 높이차를 갖는 새로운 노즐 형상, 탭을 이용한 기계역학적 및 코안다 플랩을 사용한 유체역학적 추력벡터제어 기술 등의 장점을 활용한 새로운 추력벡터제어 기술을 제안하려 한다. 이 방법을 사용하여 추력벡터제어의 가능성 및 효과성을 높이고 적용할 수 있는 노즐 압력비 및 최대 추력편향각의 크기가 증가함을 보이고자 한다. 본 연구에서는 다양한 노즐 압력비(NPR = 2.1, 2.5, 3.0, 3.5, 4.0, 4.5)와 탭의 높이비(h = 5%, 10% 및 15%) 등에 따른 추력편향각 변화를 살펴보았다.
2. 해석 모델 및 조건
2.1 노즐-01 모델(NZ-01)
탭을 이용한 기계역학적 추력벡터제어의 특성을 이해하고자 노즐-01 모델의 유동장을 수치해석적 방법을 이용하여 연구하였다. 이 노즐은 수렴-확산(converging-diverging) 노즐 형상을 가지며(Fig. 3) 노즐 출구의 압력에 비하여 하류의 배압(back pressure)이 매우 낮아 노즐 출구에서 전체적으로 초음속 유동을 갖는다(과소팽창 노즐 유동, underexpanded nozzle flow). 이 노즐은 로켓 엔진 추력벡터제어 시험을 위해 다양한 높이의 쐐기 형상의 탭을 노즐 출구 하단에 배치하였다(Fig. 4).
여기에 제시된 탭을 포함한 노즐 형상 및 실험 결과는 VTI Žarkovo의 T-36 풍동에서 수행된 2차원 초음속 노즐 시험 결과를 참고하였다[12,18,19,20,21]. 그 연구는 로켓 엔진의 추력벡터제어를 위한 방법으로 탭 모양, 크기, 위치 및 탭과 출구 사이의 간격 등에 대한 실험적 연구를 포함하고 있다.
Fig. 4에서 보는 바와 같이 탭의 높이(t)는 출구면의 높이(H)의 10%, 15%, 20% 및 25%를 가리며(Shadowing, S), 탭은 초음속 유동장에서 방해물로 작용하여 충격파를 발생시킨다. 이에 따라 탭의 앞에서 정성적으로 탭의 높이에 비례하는 박리 및 회전 유동 영역이 발생한다.
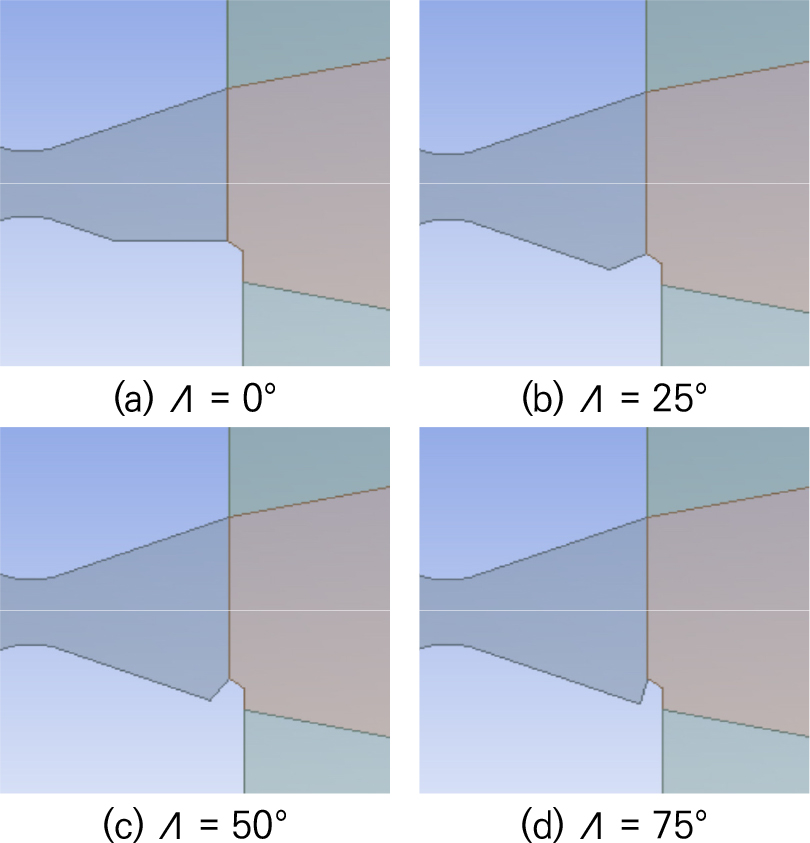
또한 본 연구에서는 위에서 언급한 각각 다른 높이를 갖는 탭에 대하여 탭 전면부 벽면이 수평축으로부터 0°, 25°, 50°, 75° 및 90°의 각도(Λ)를 갖는 형상일 때도 그 영향에 대하여 살펴보았다(Fig. 5).
본 연구에서 적용한 유동 조건은 Kostić 등[12]의 시험 조건을 사용하였다. 노즐 입구의 전압(total pressure)은 101,054 Pa, 정압(static pressure)은 101,050 Pa, 온도는 286.5 K이다. 노즐 하류에 있는 덕트의 출구 압력은 노즐 입구의 압력보다 충분히 낮게 지정하였다. 자세한 것은 참고문헌[12]에서 확인할 수 있다.
2.2 노즐-02 모델(NZ-02)
노즐-02는 동축류 유체역학적 추력벡터제어의 특성을 시험하고자 사용되었다. 이 노즐은 노즐-01보다 노즐 입출구 압력비가 작고 노즐 출구의 압력이 노즐 하류에서의 배압보다 낮은 경우에 대하여 시험되었다(과대팽창 노즐 유동, overexpanded nozzle flow).
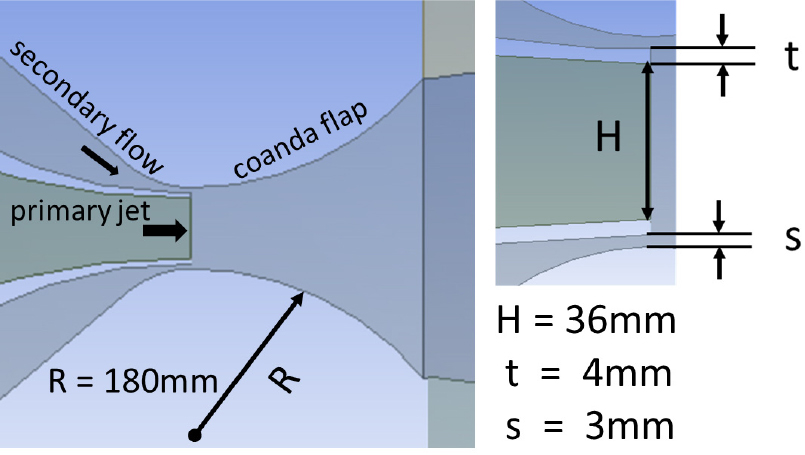
노즐-01의 시험 결과와 비교를 위해 노즐-02의 크기 및 형상은 기본적으로 노즐-01의 것을 사용하였다. 노즐 목 부분을 주노즐 유동 영역과 그 상하에서 부노즐의 이차 유동 영역으로 분리하였다. 주노즐 유동과 나란한 방향으로 부노즐의 이차 유동을 분출시켜 편향을 유도하는 동축류 추력편향제어 기술을 적용하였다. 주노즐(H) 및 부노즐(s)의 크기는 Lee와 Lee[16]의 연구를 참고하였다. 또한 이러한 조건에서 큰 추력편향각(thrust deflection angle)을 유도하기 위해 확산 노즐의 형상을 큰 반경을 갖는 원호 모양의 코안다 플랩으로 변경하였다(Fig. 6).
2.3 노즐-03 모델(NZ-03)
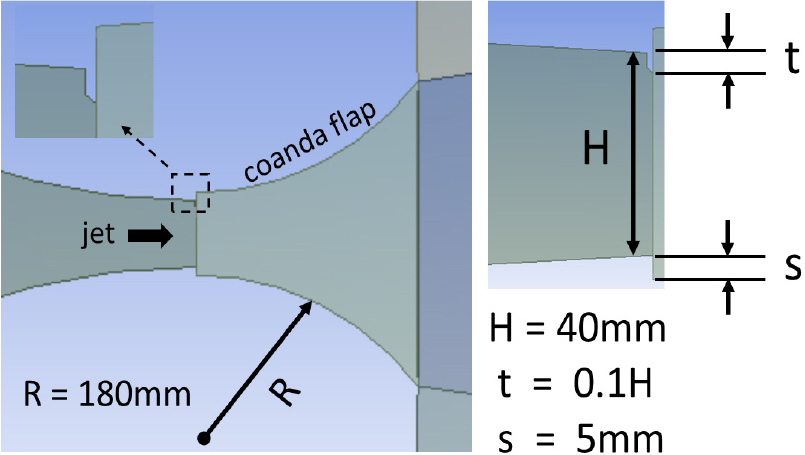
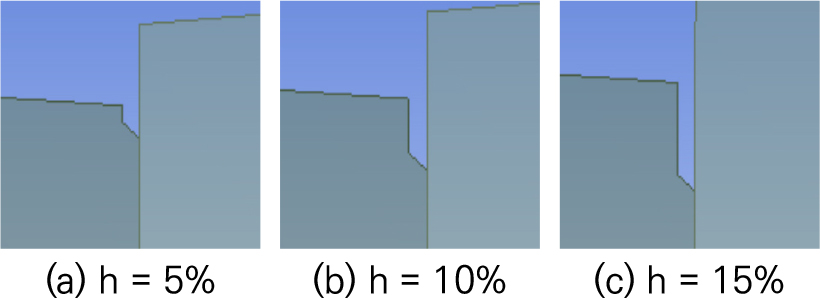
노즐-03은 노즐-01과 노즐-02에 대한 추력벡터제어의 특성에 관한 본 연구 결과들을 참고하여 노즐 형상을 수정하였다(Fig. 7). 노즐-02의 이차 유동 영역을 제거하여 노즐 형상을 단순하게 하였다. 노즐-01에서 사용한 탭을 노즐 출구가 아닌 노즐 목과 확산 노즐의 높낮이 차가 있는 부분에 장착하였다. 노즐의 기본적인 형상 및 크기는 노즐-02의 것과 같다. 쐐기 모양 탭의 높이(t)는 노즐 목 크기(H)와의 비(h)가 5%, 10%, 및 15%가 되게 하였다(Fig. 8).
노즐-02와 노즐-03 모델 시험에 적용한 유동 조건은 노즐의 코안다 플랩보다 하류에서 해석 영역의 경계 조건으로 일정 압력 8,400 Pa을 지정하였다. 노즐 입구의 압력은 NPR이 2.1, 2.3, 2.5, 3.0, 3.5, 4.0 및 4.5가 되게 압력을 지정하였다.
2.4 수치해석 방법
본 연구에서 초음속 압축성 난류 유동 및 충격파가 발생하는 노즐 유동 해석을 위하여 CFD(Computational Fluid Dynamics) 전용 소프트웨어인 FLUENT를 사용하였다[22]. 이것은 질량, 운동량, 에너지 보존 방정식 등을 사용하여, 난류 유동, 압축성 유동, 열전달, 화학반응 및 다상(multi-phase) 유동 등을 해석할 수 있어 다양한 연구 분야에 활용되고 있다.
유동의 레이놀즈 수(Reynolds number)가 커지면 난류 경계층(turbulent boundary layer)의 두께가 얇아지고, 이 유동을 적절히 해석하기 위해서는 벽면 가까이 많은 격자점과 난류 유동을 엄밀히 모사할 수 있는 난류 모델이 필요하다.
많은 경우 연구의 효율성을 위하여 RANS(Reynolds-Averaged Navier-Stokes) 방정식을 사용한다. 본 연구에서는 유동의 팽창, 충격파 발생 및 압력 변화를 정확히 예측하고자 3차의 MUSCL(Monotonic Upstream-centered Scheme for Conservation Laws)을 사용하였다.
난류 유동 해석에 흔히 사용되는 난류 모델로는 이방정식(two-equation) 난류 모델이 있다[23]. 그중에서 본 연구는 역압력 구배가 있는 경계층 유동이 흔히 발생하는 항공우주 및 유체기계(turbomachinery) 분야에서 널리 사용되고 있는 Menter의 SST 모델(Shear-Stress Transport model)을 사용하였다[23,24,25]. 역압력 구배에서 유속 형태(velocity profile)가 변형(distortion)되거나 유동 박리가 발생하는 유동장에서 난류 점성(eddy viscosity)이 과도하게 예측되는 문제가 난류 모델(eddy viscosity turbulent model)들에서 발생한다. SST 모델은 난류 점성 관계식에 제한자(limiter)를 두어 유동의 난류 전단응력 수송(transport of turbulent shear stress)을 적절히 모사하였다. 그러므로 충격파 발생으로 역압력 구배가 있는 유동 등에서 신뢰성 있는 결과를 보였다[24].
난류 경계층 유동의 정확한 해석을 위해 경계층 내에 충분한 격자를 배치하였다. 벽면으로부터 첫 격자점이 y+≈1이 되도록 격자 위치를 수정하였다. 격자에 따라 수치해석 결과가 영향을 받지 않도록 격자수와 밀집 정도 등을 수정하였다. 최종적으로 약 100만 개의 셀(cell)을 사용하였으며, 격자 형성을 용이하게 하고 정확한 계산 결과를 위해 정렬 및 비정렬 격자를 혼용하였다.
3. 노즐 유동 해석 결과
3.1 노즐-01에 대한 해석 결과
Fig. 9에서 보는 바와 같이 노즐 목을 지난 유동은 급격히 팽창하며 압력이 낮아지고 초음속 유동이 된다. 노즐 출구에서 마하수(Mach number)는 약 2.6이 된다. 노즐보다 하류의 덕트 출구에서 배압이 노즐 출구 압력보다 매우 낮다. 이것은 노즐 내부뿐만 아니라 노즐 하류에 있는 덕트 영역에서도 유동이 계속 팽창하여 마하수가 증가하게 하였다.
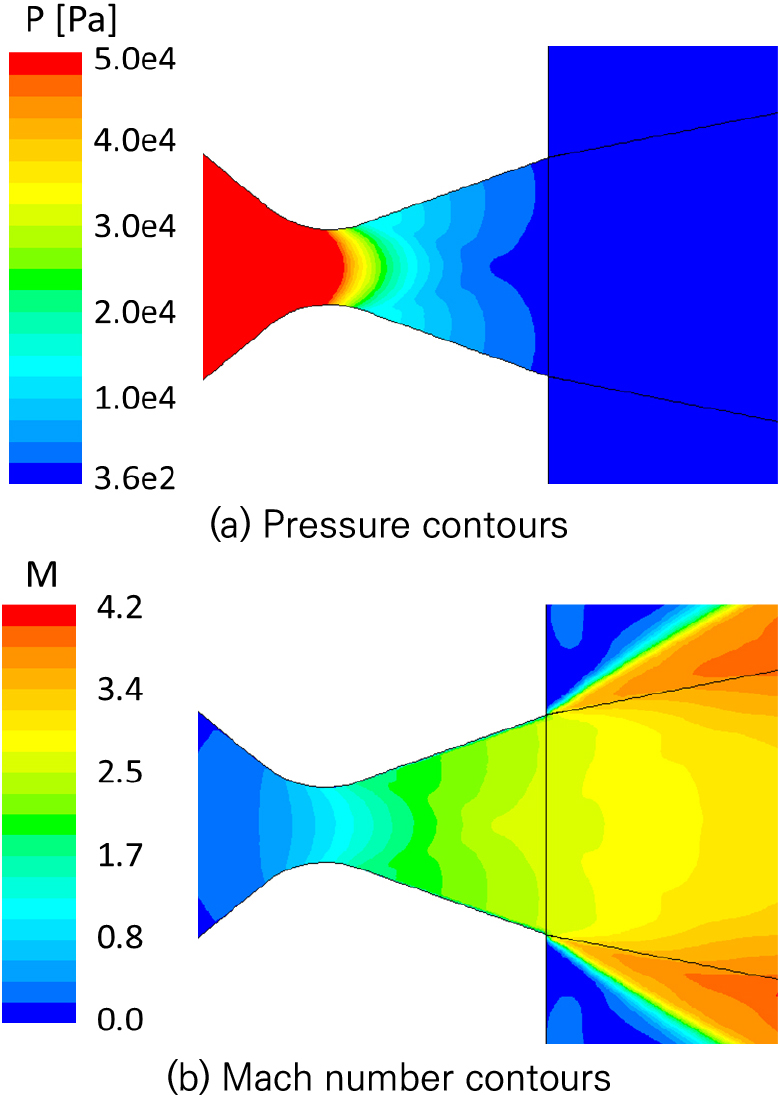
Fig. 10은 노즐 유동장에 각각 다른 높이의 탭에 의한 영향을 보여준다. 탭은 노즐 출구의 아래 하단부에 장착되며 탭의 높이가 커지면서 출구를 가리는 정도(S)가 5%에서 25%까지 증가하였다. 가림 정도 S가 증가할수록 경사충격파(oblique shockwave) 발생 위치가 앞쪽으로 이동한다. 또한 충격파와 경계층 간의 상호작용이 강하게 발생하고 노즐 벽과 탭 사이에 박리 및 회전 유동 영역이 확대된다. 노즐 아랫면에서 충격파가 발생하므로 노즐 상부와 하부 간에 압력 차이가 생긴다. 이것은 노즐의 수직 방향 힘으로 작용하게 된다. 또한 경사충격파를 지난 유동은 충격파 쪽으로 방향이 편향된다.
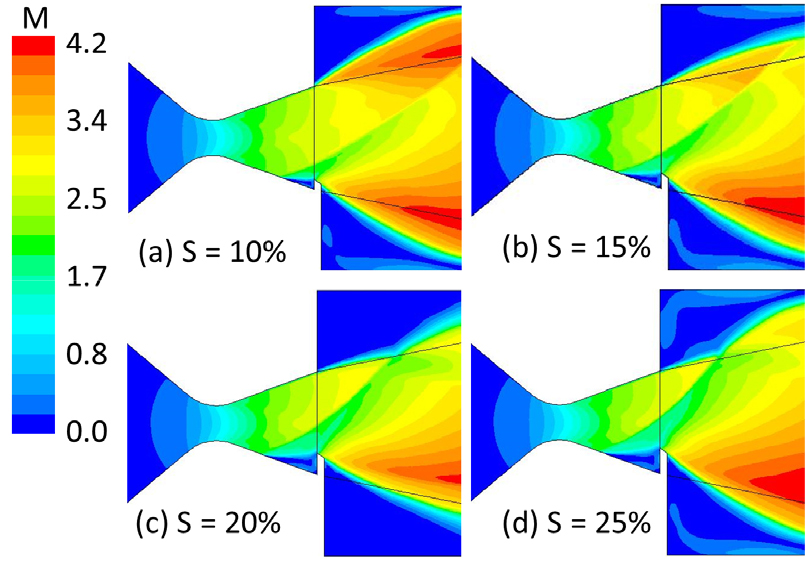
Fig. 11은 본 연구에서 수행한 수치해석 방법을 검증하기 위하여 실험[12,18]과 비교하였다. 확산 노즐 벽면의 압력은 탭이 없는 윗면은 계속 감소하고 아랫면은 충격파 발생으로 급격히 증가하였다. Fig. 11(a) S = 10%에서 격자수가 두 배 이상 증가하였을 때 본 연구의 벽면 압력분포는 실험과 좋은 비교를 보여주었다. 탭의 길이가 증가하여 S = 30%일 때 충격파는 더욱 앞쪽에서 발생하고 압력 증가 후 넓은 영역에서 충격파와 경계층이 강하게 상호작용하는 것을 볼 수 있다(Fig. 11(b)).
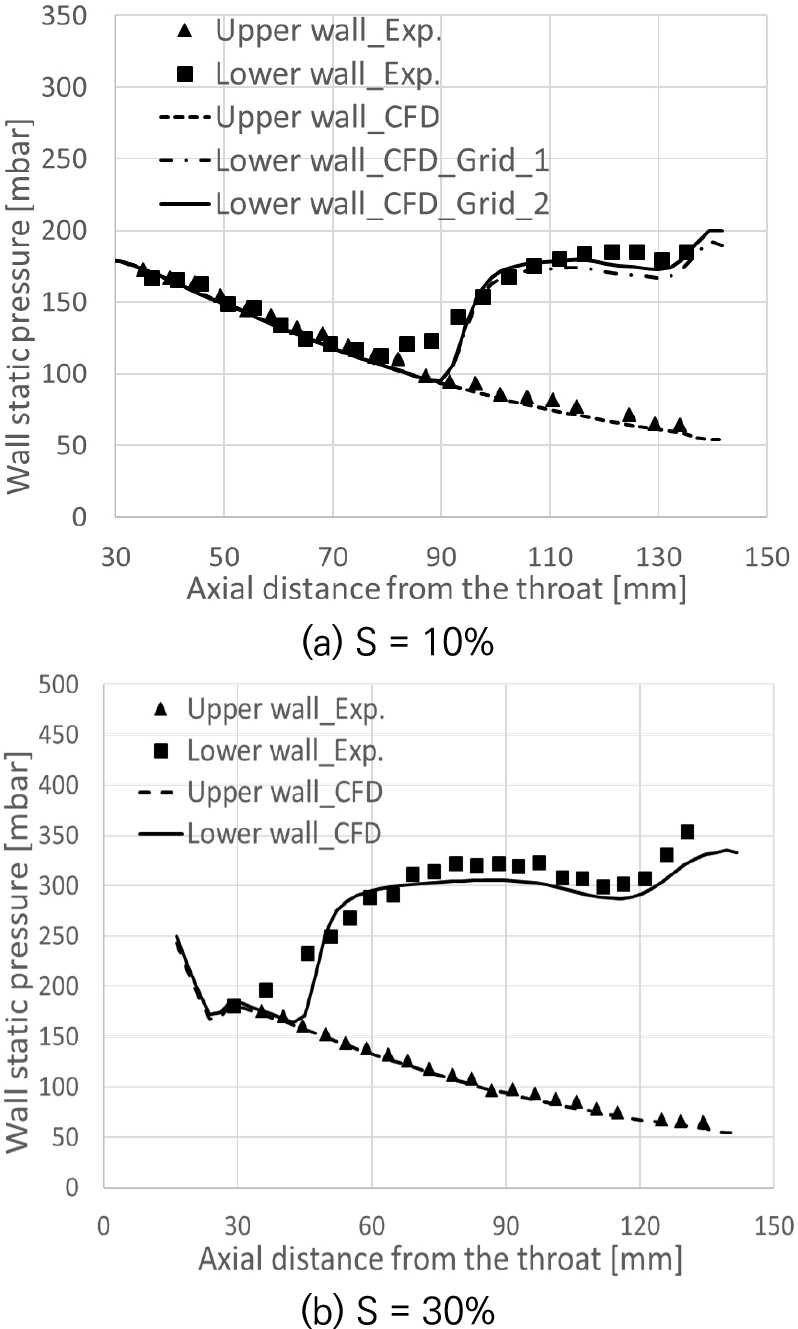
충격파와 경계층 상호작용 영역에서 난류 점성(eddy viscosity) 값을 많은 난류 모델이 크게 예측한다[24]. 이 때문에 벽면 압력의 증가가 실험보다 하류에서 시작되는 것을 볼 수 있다. 압력 증가 후 충격파와 경계층 상호작용 영역에서 거의 일정한 압력을 유지하는 것(plateau)을 본 연구가 잘 예측하였다.
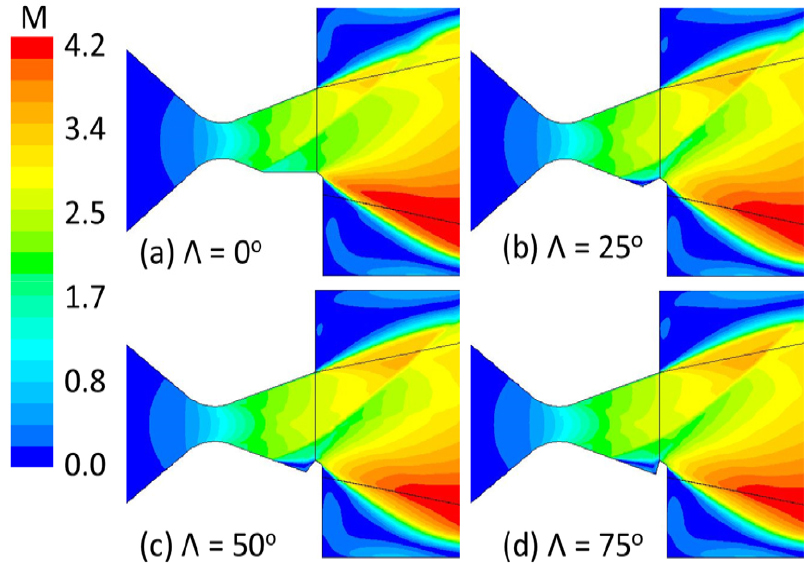
Fig. 10에서 보는 바와 같이 충격파 발생 이후 탭의 전면부에서 유동 박리와 회전 유동이 크게 발생하는데 이 상호작용 영역의 크기를 줄이고 노즐 수직 방향으로 작용하는 힘을 증가시키기 위해 압력이 보다 앞쪽에서 증가하게 하려고 탭 전면의 기울기를 변화시키며 유동장 변화를 살펴보았다(Fig. 12). 그림에서 보는 바와 같이 Λ가 작을수록 탭의 크기는 증가한다. Λ = 0°일 때를 제외하면 탭 전면에서 회전 유동 영역(탭 전면부 앞의 파란색 영역)은 여전히 존재한다.
본 연구에서 추력편향각은 유동장 내 탭을 고려하여 Kostić 등[12]에서 사용한 아래와 같은 방법으로 계산하였다.
여기서 는 노즐의 축방향(수평 방향)으로 작용하는 힘, 는 노즐의 횡방향(수직 방향)으로 작용하는 힘이다. 첨자 t는 노즐 목(throat), 는 노즐보다 하류에서의 배압(back pressure)을 가리킨다. DL 및 DU는 확산 노즐의 아래 벽면 및 윗 벽면, O는 탭을 가리킨다.
Fig. 13은 각각 탭의 출구면 가림 정도(S)와 탭 전면의 각도가 노즐 수평 방향과 이루는 각도(Λ)를 변화시킬 때 추력편향각의 변화를 살펴보았다. 각각의 탭 전면 기울기에 대하여 가림 정도를 증가시킬 때 추력편향각은 거의 선형적으로 증가하였다. 이에 반하여 일정한 탭의 가림 정도일 때 전면 기울기의 변화에는 거의 같은 값을 보였다.
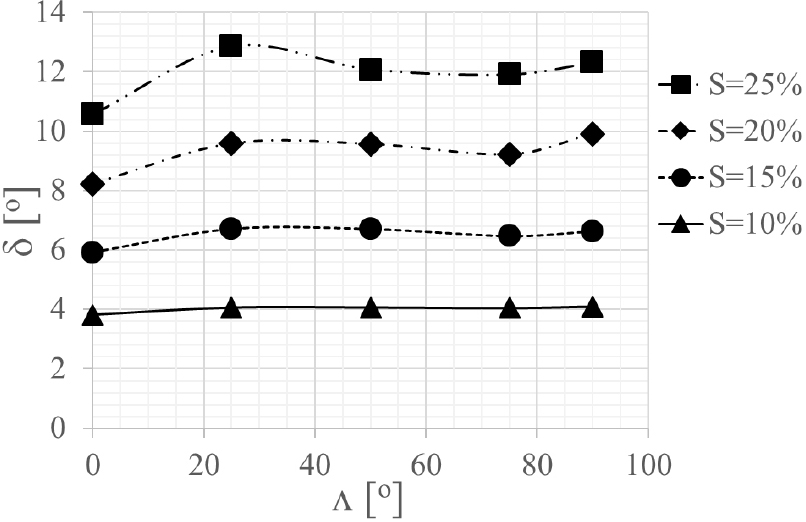
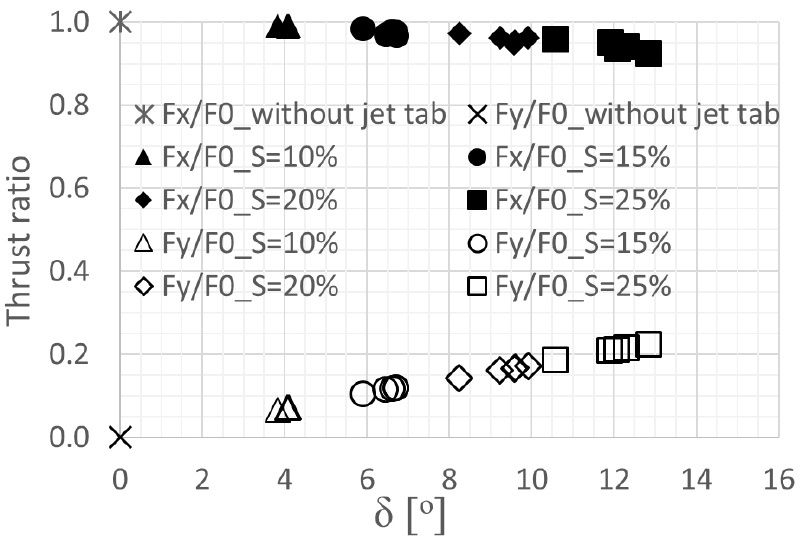
Fig. 14는 각각의 탭의 가림 정도와 전면 기울기에 대하여 추력편향각과 총추력()에 대한 축방향 및 횡방향 추력 크기비를 보여주고 있다. 그림에서 보는 바와 같이 탭의 가림 정도가 증가할 때 선형적으로 추력 크기가 변하며 추력편향각이 증가하였다. 이것을 보면 탭을 이용한 추력편향에 대한 제어를 구현하였을 때 제어 가능성과 효과의 경향성을 간단히 예측할 수 있을 것으로 생각된다.
3.2 노즐-02에 대한 해석 결과
Fig. 15의 유체역학적 추력벡터제어의 결과는 주노즐 상하에 있는 부노즐에 연결된 탱크 압력을 조절하여 노즐 목에서 유동을 비대칭이 되도록 유도하여 추력방향을 제어하게 된다. 여기서 무차원 압력비()는 아래와 같다.
여기서 는 주노즐과 연결된 탱크 압력, 는 부노즐과 연결된 탱크 압력 및 는 노즐 출구면의 압력을 각각 가리킨다.
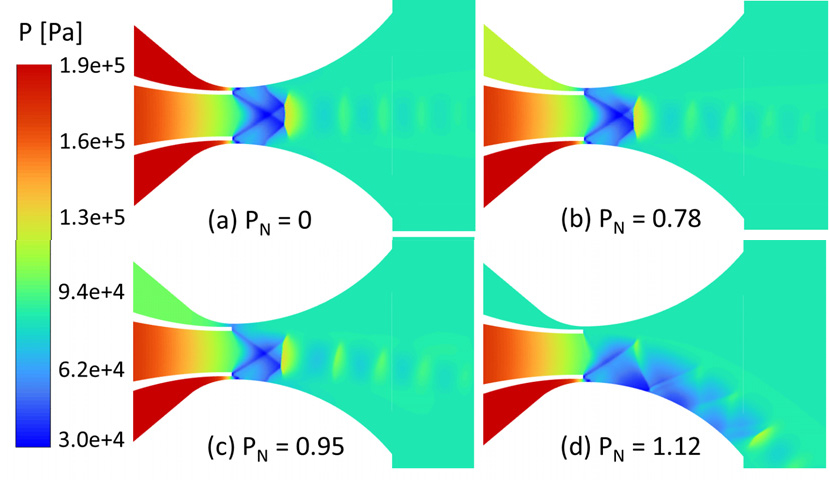
Fig. 15(a)에서 이 0일 때 노즐 목 근처의 노즐 팁(tip)에서 팽창파가 상하 대칭으로 발생하고 하류에서 마하 디스크(Mach disks)가 발생하는 것을 볼 수 있다. 상부의 부노즐과 연결된 탱크 압력()이 감소하며 이 증가하면 상부 노즐 팁에서 팽창파가 약화하며 압력이 회복되고(Fig. 15(c), (d)) 상부 부노즐의 하류에서 마하수가 증가하지 않는다(Fig. 16(c), (d)). 노즐 목 하부에서는 유동의 팽창으로 압력이 낮게 유지되므로 노즐 목을 지난 유동이 압력이 낮은 아랫쪽으로 편향된다. 상부의 부노즐의 질량 유량이 거의 0이 되게 압력을 낮추면(Fig. 15(d)) 유동이 코안다 플랩을 따라 흐르며 최대 추력편향각을 가지는 것을 볼 수 있다(Fig. 16(d)).
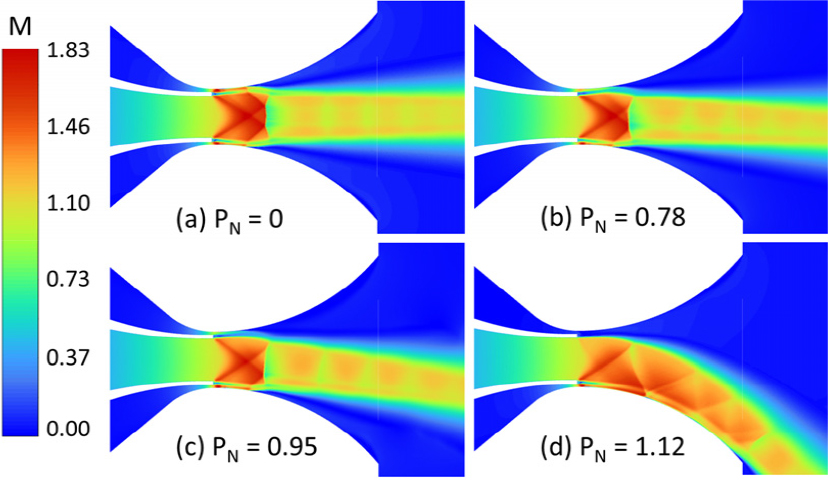
Fig. 17은 각각의 노즐 압력비에 대하여 최대 추력편향각을 가질 때의 밀도변화를 보여주고 있다. 대체로 이 1보다 조금 큰 값일 때, 즉 상부 부노즐의 질량유량이 거의 0일 때 최대 추력편향각을 갖는다. 노즐 압력비가 증가할수록 최대 추력편향각은 감소하는 것을 볼 수 있다. Fig. 18은 각각의 노즐 압력비에서 변화에 따른 추력편향각 변화를 보여주고 있다. 노즐 압력비가 3 이상으로 커지면 추력편향이 거의 발생하지 않으며, 노즐 압력비가 2.3인 경우에도 큰 추력편향각을 가질 수 있는 의 범위가 제한적인 것을 볼 수 있다.
3.3 노즐-03에 대한 해석 결과
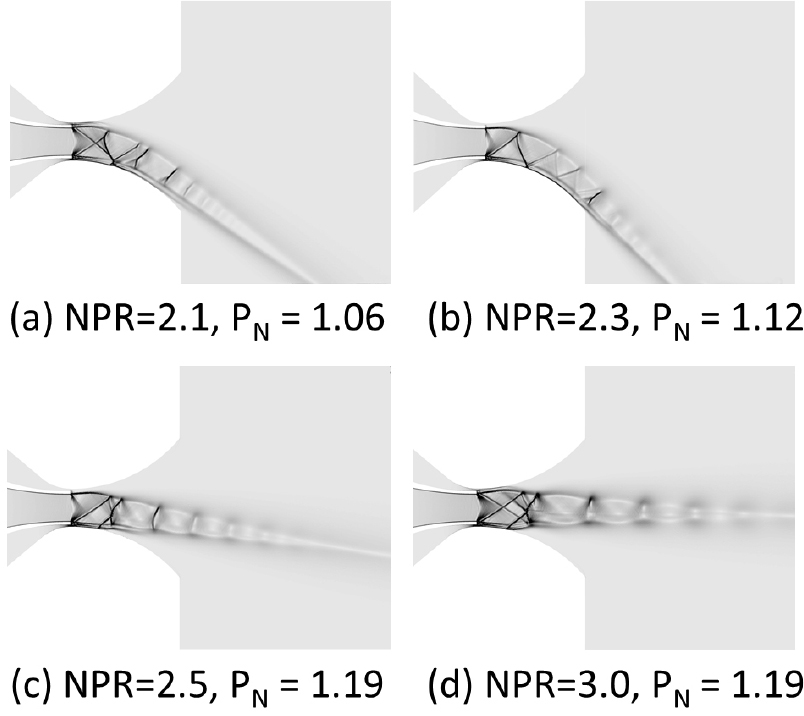
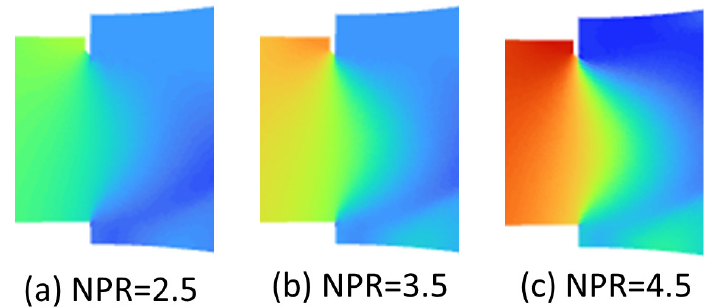
Fig. 19는 각각의 노즐 입출구 압력비일 때 노즐-03의 유동장내 압력분포를 보여주고 있다. 노즐-03은 노즐-02에서 주노즐 상하의 부노즐들을 제거하고 노즐 목에 탭(h = 10%)을 장착하여 기계역학적 추력벡터제어 방법을 사용하고자 하였다. 제어해야 하는 유동장을 단순하게 하고 노즐-01과 같이 제어에 대한 효과가 예측할 수 있는 경향성을 갖도록 하고자 노즐 형상을 수정하였다.
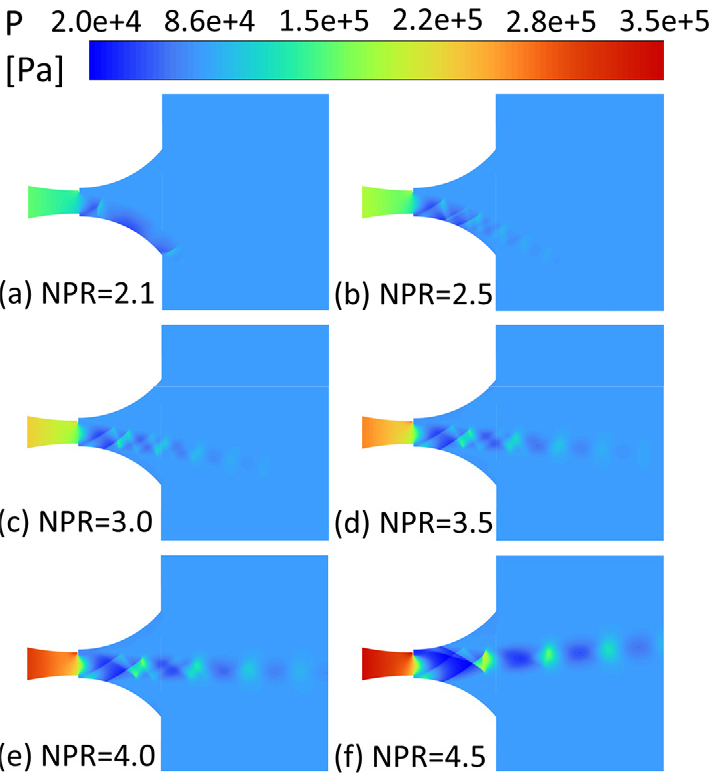
Fig. 19(a)의 노즐 입출구 압력비가 낮은 경우(NPR = 2.1) 노즐 목의 하부는 노즐 목과 확산 노즐 간의 높낮이 차(단차)로 인해 유동이 팽창하여 압력이 낮아졌고 탭이 장착된 상부는 탭의 유동 방해로 노즐 목 끝단에서 유동 팽창이 발생하지 않고 이 부분에 노즐 하류의 배압과 같은 정도의 압력을 갖게 되었다. 이에 따라 압력이 높은 노즐 상부에서 압력이 낮은 노즐 하부로 유동이 발생하여 노즐 유동의 방향이 전환되고, 코안다 플랩을 따라 아래로 향하는 큰 추력편향을 보였다(Fig. 20(a)). Fig. 21에서 보는 바와 같이 노즐 목 상류와 하류의 압력차, 노즐 목에 장착된 탭 및 노즐 목의 단차 등에 의해 노즐 목 인근 압력분포가 변화하고, 탭이 있는 노즐 상부와 단차만 있는 하부에 형성되는 압력의 차이에 의해 추력편향이 발생하는 것을 볼 수 있다. 압력비가 낮은 경우(NPR = 2.5)에서는 노즐 목을 지나고 탭을 지난 노즐 상부에서 유동의 압력이 노즐 목과 단차를 지난 노즐 하부에서의 압력보다 높다. 그래서 노즐 유동이 아래 방향으로 향한다. 압력비가 높은 경우(NPR = 4.5)에서는 노즐 목에서 단차만 있는 하부보다 상부의 탭을 지난 유동이 낮은 압력을 형성하는 것을 볼 수 있다. 이 같은 경우 노즐 유동이 위 방향으로 향한다.
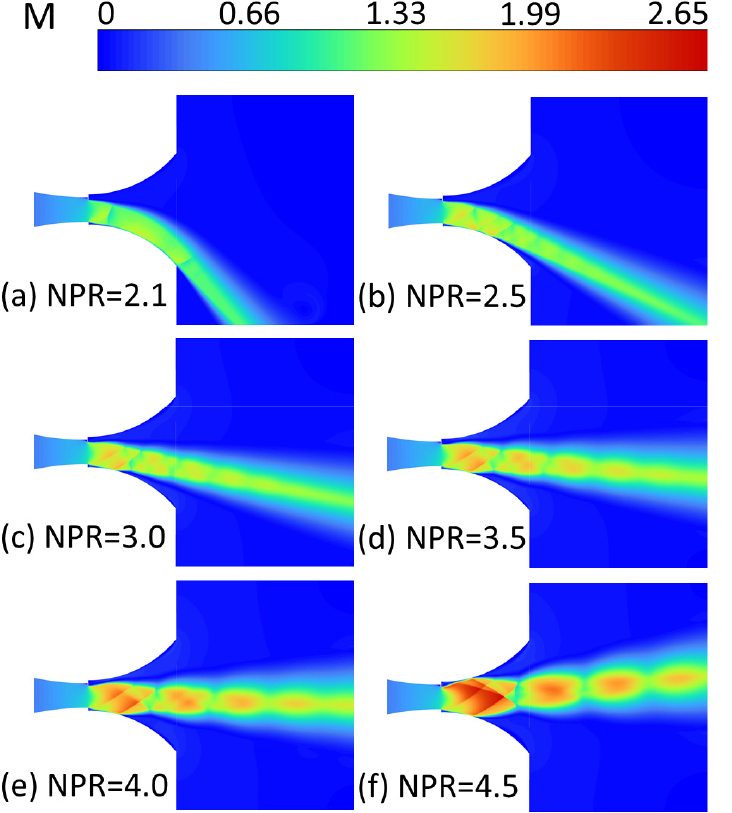
이러한 현상은 입출구 압력비가 증가할수록 노즐 목 이후 유동의 팽창으로 마하수가 증가하고 유동의 경계(free jet boundary)가 코안다 플랩의 상부면에 가까워지며 추력편향각이 감소하는 것을 볼 수 있다(Fig. 22(d)). 노즐 압력비가 4.5인 경우, 노즐 목과 코안다 플랩간의 단차 및 탭의 높이로 만들어진 공간에서 탭을 지난 유동이 팽창하여(Fig. 22(f)) 압력이 낮아지고(Fig. 19(f)) 유속이 빨라지며 마하수가 증가(Fig. 20(f))한 것을 볼 수 있다. 이 경우 노즐 목이후의 상부와 하부의 압력과 속도차로 유동이 상부 쪽으로 방향이 전환되고 추력편향이 반대로 발생하였다.
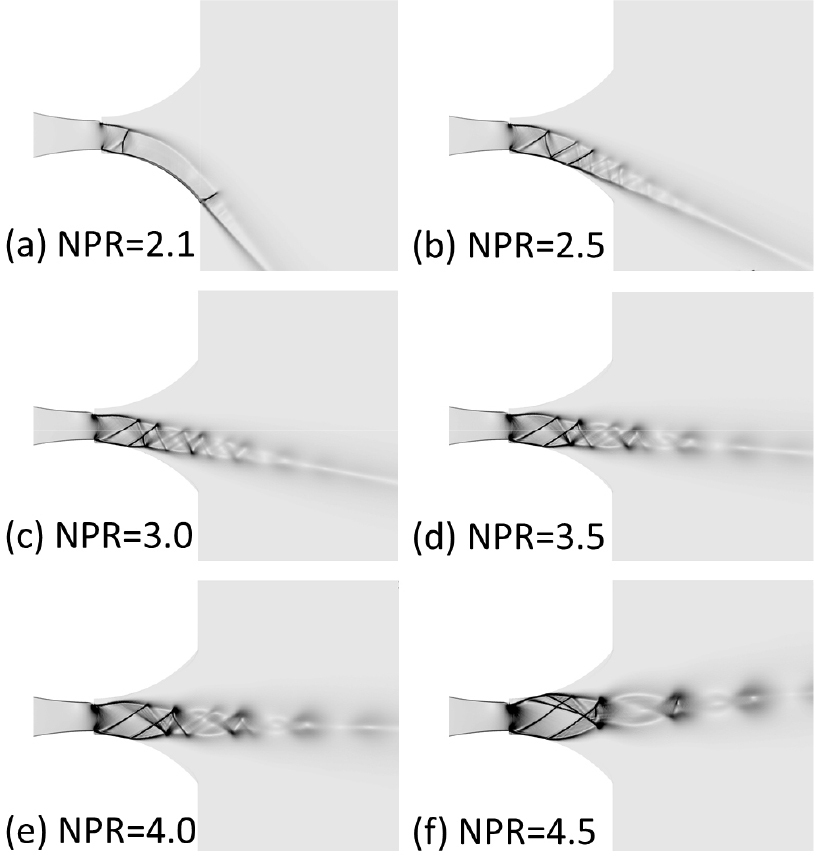
Fig. 23은 노즐-03에서 노즐에 장착된 탭 높이의 노즐 목 높이에 대한 비율 h가 5%, 10% 및 15%일 때와 노즐-02에서 각각의 노즐 압력비에서 최대 추력편향각을 가질 때를 비교해 보여주고 있다. 탭이 있을 때 노즐 압력비가 증가하면 추력편향각이 감소한다. 탭의 높이비 h가 10%와 15%일 때 거의 유사한 추력편향각을 가지며 NPR = 2.1에서 4까지 h = 15%일 때 더 큰 값을 가진다. 이 구간에 노즐-02를 이용한 유체역학적 추력벡터제어 방법을 사용하면 입출구 압력비가 증가할 때 급격히 추력편향각이 감소하였다. 탭의 높이비가 작아질 때(h = 5%) 탭이 없는 노즐-02의 결과와 유사한 경향성을 보인다. 노즐 압력비 NPR = 4.5일 때는 탭의 높이가 높으면(h = 15%) 압력비 낮을 때와 반대 방향으로 추력편향이 발생하는 것을 볼 수 있다.
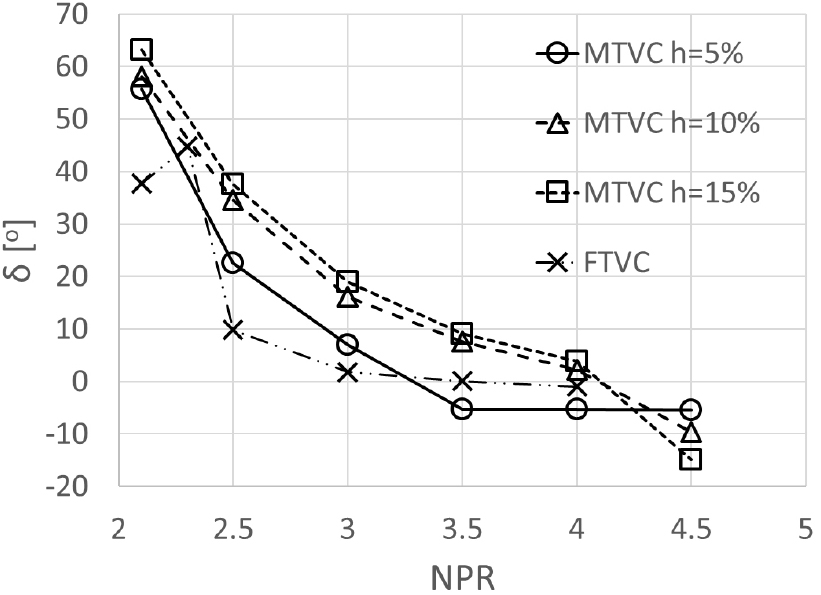
본 시험 결과를 전체적으로 Table 1에서 보는 것과 같이 노즐-02에서 부노즐의 압력 및 유량을 조절하여 추력벡터를 제어하는 방법(FTVC 방법)보다 노즐-03에서 탭을 이용한 방법(MTVC 방법)이 보다 넓은 노즐 압력비 구간에서 큰 추력편향각을 가지며 보다 효과적인 제어가 가능할 수 있음을 알 수 있다.
Table 1.
Comparison of thrust deflection angle for different pressure ratios.
| NPR | 2.1 | 2.5 | 3.0 | 3.5 | 4.0 | 4.5 | |
| Category | Deflection angle[°] | ||||||
| Exp.[14] | 7.5 | 62.1 | 8.3 | 2.5 | - | - | |
| FTVC | A | 37.5 | 9.8 | 1.8 | 0.01 | 1.0 | - |
| MTVC (h=10%) | B | 58.1 | 34.6 | 16.1 | 7.7 | 2.2 | 9.6 |
| B / A | 1.5 | 3.5 | 8.9 | 77 | 2.2 | - | |
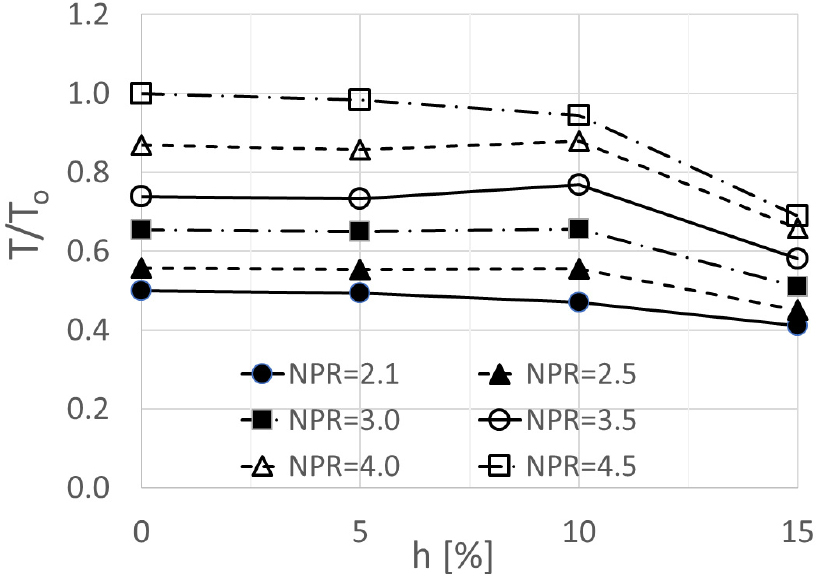
Fig. 24는 탭의 높이와 노즐 입출구 압력비 변화에 따른 총추력의 변화를 보여준다. To는 NPR = 4.5이고 탭이 없는 경우(h = 0%)일 때의 총추력의 크기이다. 압력비가 감소함에 따라 총추력의 크기는 감소한다. 각각의 압력비에서 탭의 높이가 h = 0%에서 10%까지 증가할 때 총추력 크기는 유사하였다. 탭이 h = 15%의 경우 총추력이 크게 감소하는 것을 볼 수 있다. 감소하는 정도는 압력비(NPR)가 증가할수록 증가하는 경향을 보였다.
4. 결 론
본 연구에서는 탭과 코안다 플랩을 사용한 새로운 형태의 초음속 노즐의 추력벡터제어 기법을 연구하였다. 연구 결과는 낮은 노즐 압력비(NPR = 2.1)에서 기존 유체역학적 추력벡터제어에서와 유사한 63°의 추력편향각을 보여주었다. 또한, 압력비 3일 때 약 20°, 3.5일 때 약 10°의 추력편향각을 보이며 유체역학적 추력벡터제어 기법과 비교하여 큰 추력편향각을 보였다.
추력편향각 변화에 영향을 주는 요소로서 노즐 목에 장착한 탭의 높이를 변화시키며 유동장에 대한 영향을 시험하였다. 탭의 높이가 낮을 때(h = 5%) 탭이 없는 유체역학적 추력벡터제어의 결과와 유사한 경향을 보였다. 탭의 높이가 h = 10% 이상으로 높을 때는 거의 동일한 추력편향각을 보였다. 노즐 유동에 영향을 줄 수 있는 다양한 요인들에 대한 연구가 필요할 것으로 생각된다.
기존의 탭 및 베인을 이용하는 기계역학적 추력벡터제어 방법은 확산 노즐 하류에 탭 혹은 베인을 장착하므로 유로가 넓고 고속인 유동의 방향을 변화시켜야 한다. 그러므로 기계 장치가 크고 무거울 수 있다. 이에 비하여 본 연구에서 제안하는 노즐 목에 탭을 장착하는 경우 상대적으로 유동 속도가 낮고 유로가 좁으므로 장치의 크기를 작게 하여 무게를 줄일 수 있다. 협소한 내부 공간에 장치를 구현하는데 어려움이 있을 수 있지만, 내부에 기계 장치를 장착하므로 외부 유동에 의한 추가적 유동 손실을 줄일 수 있다.
유체역학적 추력벡터제어 기법이 좁은 범위의 노즐 압력비에서 큰 추력편향각을 보이며 압력비가 증가할 때 급격히 감소하는 데 비하여 본 연구에서 사용한 새로운 추력벡터제어 방법은 보다 넓은 압력비 범위에서 추력편향을 제어할 수 있고 효과적이고 안정적 제어를 기대할 수 있을 것으로 생각된다.
