

1. 서 론
2. 본 론
2.1 플렉서블 씰 형상 설계 변수 선정
2.2 플렉서블 씰 유한요소 모델 자동생성 프로그램 모듈
2.3 GUI 사용자 환경 구현
2.4 프로그램 구조 해석 검증
2.5 작동 토크량 – NASA 문헌과의 비교 검증
3. 결 론
1. 서 론
로켓의 추력 방향 조종 시스템(TVC, Thrust Vector Control System)은 노즐의 움직임 여부에 따라 고정 노즐과 가동 노즐 크게 2가지로 나눌 수 있다[1]. 고정 노즐(Fixed Nozzle)은 노즐을 고정시켜 두고 노즐 확대부의 중앙이나 끝단에 노즐을 통해 배출되는 연소 가스의 유동 방향을 바꿀 수 있는 장치를 설치하여 추력 방향을 조종하는 방법이다[2]. 고정형 노즐의 경우 추력 방향 조종에 따른 추력 손실이 증가한다는 단점이 있다.
가동 노즐(Movable Nozzle)은 구동 장치(Actuator)를 이용해 노즐을 움직여 추력 방향 조종을 한다. 고정 노즐 대비 추력손실이 적을 뿐만 아니라 큰 편향 추력을 얻을 수 있다는 장점 때문에 유도무기 체계에 널리 적용되고 있다[3].
고체 로켓 모터의 추력 방향 조종 장치로는, 고정형 노즐에서 사용되는 Jet Vane, Jet Tab, SI(Secondary Injection) TVC와 가동형 노즐에서 사용되는 Flexible Seal, Ball & Socket 방식이 주로 사용된다. 가동형 노즐 시스템은 추력이나 특정 임펄스(Impulse)를 크게 감소시키지 않으며 다른 TVC 유형에 비해 무게 경쟁력이 있다는 장점이 있으며, 주로 장거리 발사 시스템 및 노즐목 직경이 30~50 인치에 이르는 대형 우주 발사 부스터(Booster)에 사용된다[4].
가동형 노즐 시스템의 한 종류인 플렉서블 씰(Flexible Seal)은 일종의 고무 베어링으로서, Fig. 1(a)와 같이 고체 로켓 모터에 장착되어 추력 벡터 제어를 가능하게 한다. 플렉서블 씰은 가동 노즐의 회전 운동을 위해, 동일한 회전 중심을 갖는 탄성중합체 패드(Elastomer Pad)와 금속 또는 복합재료로 된 강화용 심(Reinforcement Shim)이 적층된 형태를 가진다. 이때 이러한 공통의 회전 중심을 기하 피봇점(Geometric Pivot Point)이라고 한다.
플렉서블 씰 내의 탄성중합체 패드는 구동 장치에 의해 전단 변형이 발생하고, 그 결과 노즐이 쉽게 회전(벡터링, Vectoring)할 수 있다. Fig. 1(a)에는 플렉서블 씰에 의해 편향된 가동 노즐의 모습을 나타내었으며, Fig. 1(b)에는 Fig. 1(a) 내 노즐의 편향을 위해 전단 변형된 플렉서블 씰의 모습을 나타내었다[1,5,6]. 한편, 플렉서블 씰은 장착 부위인 고체 로켓 모터와 가동 노즐 사이에서 연소 압력이 새지 않도록 밀폐 설치되어있다[7].
플렉서블 씰의 벡터링 제어는 구동 장치를 이용하여 Pitch/Yaw 방향으로 밀거나 당기는 방식으로 수행된다. 플렉서블 씰을 밀고 당기는 토크 값이 클 경우, 구동에 큰 힘이 요구되므로 구동기의 크기와 무게가 커지게 되어 전체 성능에 악영향을 미친다. 이와 같은 문제를 해결하기 위해 플렉서블 씰의 개발 과정에서 경량화 평가를 수행하며, 이때 반복적인 설계를 동반한다. 따라서 설계 과정의 효율성과 생산성을 향상시키기 위해 플렉서블 씰의 설계를 자동화할 수 있는 프로그램 개발이 필요하다.
플렉서블 씰에 대한 연구는 그 중요성으로 인해 해외에서도 지속적으로 수행 중에 있는 실정으로서[8,9,10,11,12], 최근 우주 개발의 중요성이 나날이 높아지고 있는 이 시점에 국내에서도 이러한 효율적 설계 도구의 개발이 필요하다고 할 수 있다.
이에 본 연구에서는 플렉서블 씰 시스템의 효율적 설계 및 이를 통한 경량화를 위해 GUI(Graphical User Interface) 기반의 플렉서블 씰 설계 자동화 프로그램을 개발하였다. 설계자동화 및 상용 유한요소 해석기인 ABAQUS와의 연동을 위해 Python 프로그래밍 언어를 이용한 플렉서블 씰의 설계 자동화 모듈을 구성하였다. 또한, 개발된 모듈의 사용자 편의성을 높이기 위해 Qt 라이브러리를 이용하여 GUI 환경을 구축하였다.
2. 본 론
2.1 플렉서블 씰 형상 설계 변수 선정
플렉서블 씰 설계 자동화 프로그램을 개발하기 앞서, 우선 플렉서블 씰 형상 설계에 사용되는 매개변수를 선정하였다. 이를 위해 국외에서 수행된 연구[13]를 참고하였다. Fig. 2에는 플렉서블 씰을 이용한 가동 노즐 시스템을 도시하였다. Fig. 3에는 Fig. 2의 플렉서블 씰을 확대하여 나타내었으며, 본 연구에서 플렉서블 씰 형상 설계를 위해 필요한 입력 매개변수를 그림에 나타내었다. 매개변수 명과 의미는 Table 1에 나타난 바와 같다[13]. Fig. 2, 3에 도시된 것처럼, 플렉서블 씰은 동일한 회전 중심을 가진 탄성 중합체 패드와 강화용 심이 번갈아가며 층을 이룬다. 해당 층의 회전 중심인 피봇점은 노즐 중심선에 위치한다.
Table 1.
Definition of input parameters for design of flexible seal system[13].
Fig. 3과 Table 1에 나타낸 바와 같이, Rin은 노즐 축을 기준으로 가장 내측에 있는 탄성 중합체 패드의 내부 면으로부터 피봇점까지의 거리를 의미한다. Rin은 플렉서블 씰의 크기를 결정하는 데 지배적인 역할을 하는 형상 설계 변수이며, Rin을 변경하여 고체 로켓 모터의 사이즈에 맞는 플렉서블 씰을 설계할 수 있다.
R1과 R2는 노즐 축에 가장 가깝게(R1) 또는 가장 멀리(R2) 위치한 탄성중합체 패드의 좌측(Fig. 3을 정면으로 바라보는 것을 기준으로 좌측) 모서리와, 노즐 축의 수직 거리를 의미한다. R3는 R1과 동일한, 그리고 R4는 R2와 동일한 탄성중합체 패드의 우측 모서리와 노즐 축의 수직 거리를 의미한다. R1과 R3를 변경하여 노즐목의 사이즈 조건에 맞는 플렉서블 씰을 설계할 수 있다. R2, R4는 독립적인 형상 설계 변수인 R1, R3와 다르게, Table 1의 8가지 형상 설계 변수를 통해 그 값이 결정된다.
α는 플렉서블 씰의 중심을 관통하는 선과 피봇 점에서 씰의 중심을 연결하는 선이 이루는 각도를 의미한다. Z는 투영 면적 비율로서, 씰의 앞쪽 끝의 축 방향으로 투영된 면적과 씰의 뒤쪽 끝의 축 방향으로 투영된 면적의 비율로 정의된다. α, Z는 플렉서블 씰의 장착 각도 및 형상을 결정짓는 변수이다.
Te는 탄성중합체 패드의 두께를, Ts는 강화용 심의 두께를 의미한다. Ne는 탄성중합체 패드의 개수를, Ns는 강화용 심의 개수를 의미하며 Ne는 Ns+1의 값을 가지므로 본 연구에서는 Ne와 Ns 중 Ns만을 입력 변수로 설정하였다. 탄성중합체 패드의 두께와 개수에 따라 플렉서블 씰 내부에 작용하는 응력이 변화하게 된다[1]. 그러므로 탄성중합체 패드 및 심의 두께와 개수를 적절히 조합하여 플렉서블 씰을 설계해야 한다.
2.2 플렉서블 씰 유한요소 모델 자동생성 프로그램 모듈
ABAQUS에서는 해석 모델 및 데이터에 대한 Python 언어 기반의 Application Programming Interface(API)를 제공하고 있다[14].
이에 본 연구에서는 Python 프로그래밍 언어를 활용하여 플렉서블 씰 유한요소 모델 자동생성 모듈을 개발하였다. 이 자동화 모듈은 세부적으로 자동 유한요소 모델 전처리 기능, 해석 연동 기능, 후처리 기능으로 구성되어 있다.
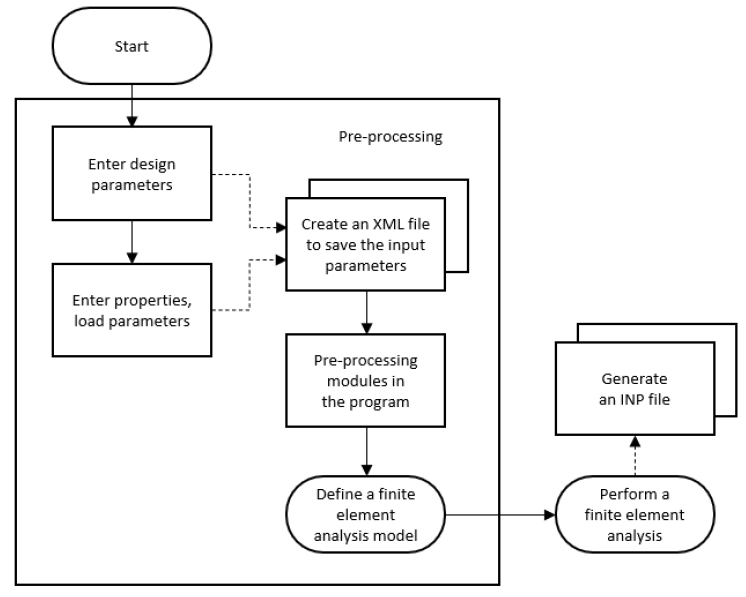
전처리 기능은 플렉서블 씰의 기하 모델 생성, 물성 정의, 하중 조건 정의 등에 관여한다. 앞서 정의된 Table 1의 형상 설계 변수를 입력하여 플렉서블 씰 3차원 형상을 자동으로 모델링 할 수 있도록 구성하였다. 개발된 모듈은 형상 설계 과정에서 단면 형상 스케치에 필요한 포인트를 생성하여 모델을 설계하므로 모델의 치수 데이터 변화에 유기적으로 대응할 수 있다. Fig. 4에는 형상 설계 변수 입력을 통해 자동 모델링된 플렉서블 씰 모델의 CAD 형상을 나타내었다. 이 모델은 유한요소해석을 위한 기본 형태이다.
설계 자동화 프로그램의 전처리 모듈은 Fig. 5의 순서도에 나타낸 절차에 따라 작업을 진행한다. 사용자는 GUI 환경을 통해 설계 매개변수와 해석 조건(물성, 하중 등)을 입력하며, 입력된 매개변수들은 XML(eXtensible Markup Language) 파일에 자동으로 저장된다. 입력 매개변수가 저장된 XML 파일은 전처리 모듈과 연동되어, 해당 모듈 내 대응되는 Python 스크립트 내 변수를 입력 매개변수에 맞게 조정한다. 이 조정을 통해 유한요소해석 모델의 설계 및 해석 작업이 실행된다. 이때 XML 파일을 사용하면 데이터를 태그 별로 구분하여 데이터를 쉽게 확인할 수 있으므로, 사용자가 GUI 없이 파일을 통해서도 입력데이터를 쉽게 확인하고 관리할 수 있는 장점이 있다.
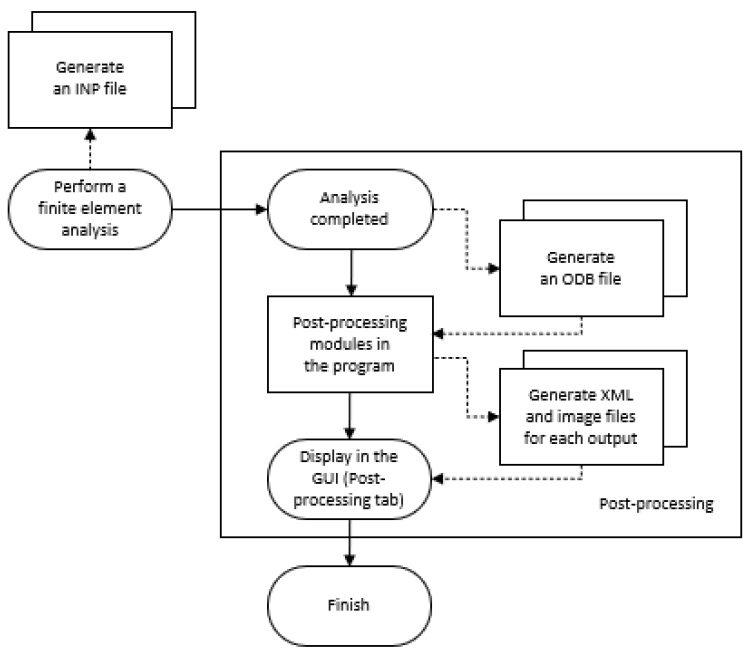
유한요소해석이 완료되면, 설계 자동화 프로그램의 후처리 모듈은 해석 결과 데이터가 저장되는 ODB(Output DataBase) 파일에 접근하여 해석 결과 데이터를 자동으로 추출한다. 후처리 과정에 대한 모듈은 해석 결과 데이터를 추출하여 XML 파일에 저장하고 유한요소 모델의 해석 결과 이미지 파일을 생성하는 기능을 수행한다. 후처리 과정의 결과는 플렉서블 씰 설계 자동화 프로그램의 GUI 사용자 환경을 통해 확인할 수 있도록 구성하였다. Fig. 6의 순서도는 개발된 플렉서블 씰 자동생성 프로그램 모듈의 후처리 과정을 나타낸 것이다.
2.3 GUI 사용자 환경 구현
앞서 설명한 플렉서블 씰 자동생성 모듈의 사용자 편의성을 높이기 위해 Qt 라이브러리와 C++ 언어를 이용하여 GUI 환경을 구축하였다.
GUI 구현에 사용된 Qt 라이브러리는 풍부한 애플리케이션 인터페이스와 뛰어난 크로스 플랫폼 기능을 갖춘 객체 지향 프레임워크이다[15]. Qt는 UI 기반의 애플리케이션 개발에 필요한 다양한 API를 Windows나 Linux와 같은 여러 플랫폼에서 지원한다. Qt는 GUI 제공 뿐만 아니라 데이터베이스, 네트워크, 그래픽(OpenGL, SVG, Open VG 등), 데이터 처리, 멀티스레드, Webkit 등 애플리케이션 개발에 필요한 방대한 라이브러리를 제공한다[16].
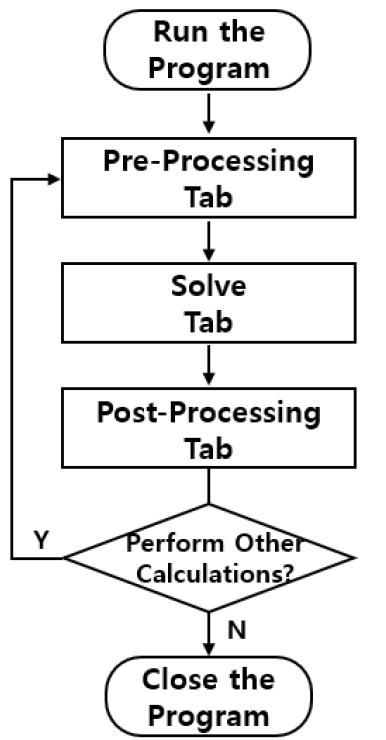
본 프로그램은 유한요소해석 절차를 고려하여 Fig. 7과 같이 전처리(Pre-processing), 해석 수행(Solve), 후처리(Post-processing)의 순서로 최상위 탭을 구성하였다.
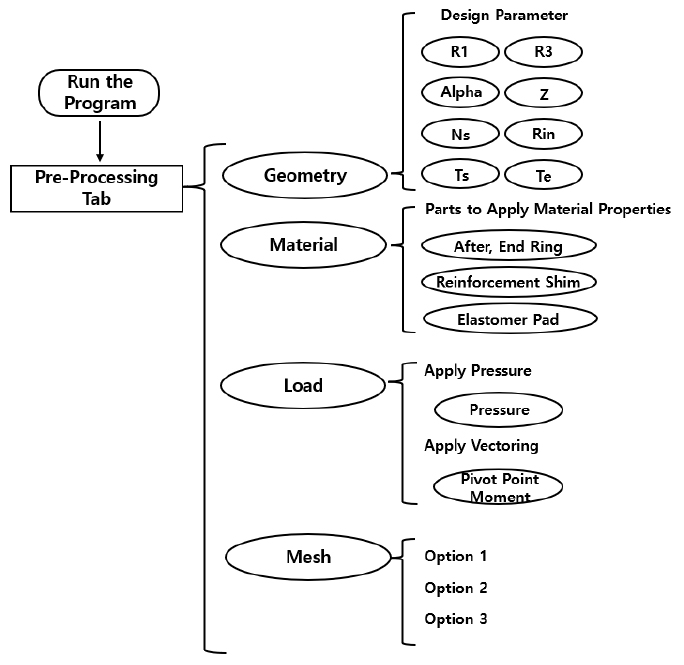
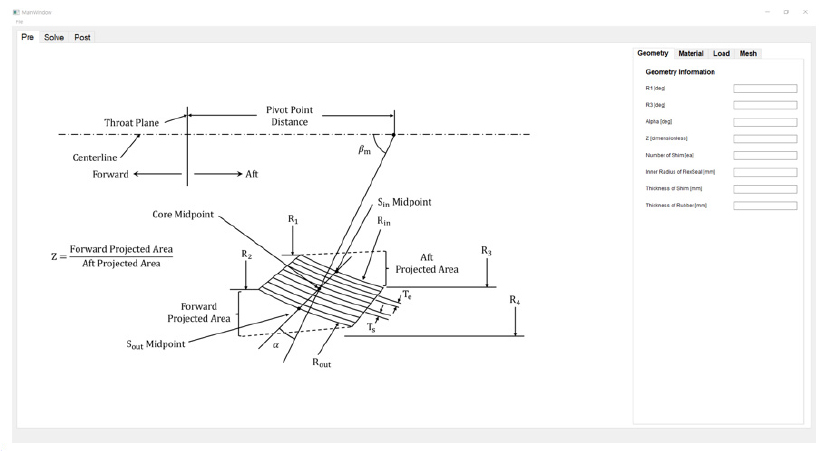
전처리 탭의 경우, 플렉서블 씰의 형상 설계 변수, 물성 및 하중 관련 조건을 사용자가 입력할 수 있도록 구성하였다. Fig. 8에 나타난 Pre-Processing Tab, Geometry 구성은 Table 1의 형상 설계 변수 8개를 입력하여 플렉서블 씰 모델의 기하학적 형상을 정의하는 기능을 수행한다. Material 구성은 플렉서블 씰 모델의 재질 특성을 정의할 수 있다. 전방 및 후방링, 강화용 심, 탄성중합체 패드에 해당하는 재료의 밀도, 탄성 계수(영의 계수), 포아송비와 같은 기본적인 물성부터, 필요에 따라 더 구체적인 재질 특성까지 입력할 수 있다. Load 구성은 플렉서블 씰 모델에 작용하는 외부 하중을 정의한다. 고체 로켓 모터의 연소압과 벡터링에 관련된 하중의 크기, 방향 등을 설정할 수 있다. Mesh는 설계된 플렉서블 씰의 형상에 맞춰, 최대한 육면체 요소로 자동생성할 수 있도록 하였다.
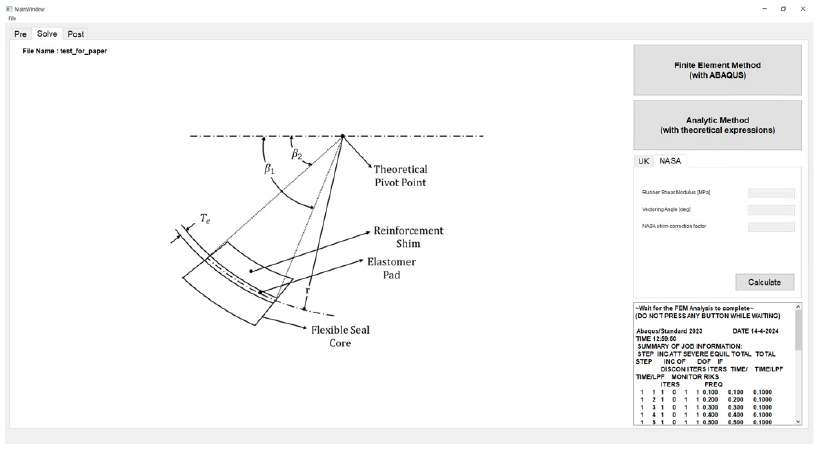
Solve 탭의 경우, Fig. 9에 보이는 것 같이 전처리 탭에서 모델 정의와 관련된 모든 작업을 완료한 후에 유한요소해석을 수행하거나 문헌상의 이론식[1]을 통해 계산을 수행하도록 구성하였다. 유한요소해석은 설계 자동화 모듈을 이용해 수행되며, 전처리 단계에서 사용자가 정의한 형상 설계 파라미터에 따라 플렉서블 씰 해석 모델을 자동 설계하고, 해당 모델에 해석 조건을 적용하여 유한요소해석을 수행하게 된다. 이론식을 통한 계산은 앞서 유한요소해석을 위해 입력된 파라미터와 함께, 이론식에만 특별히 포함되어있는 추가 파라미터를 별도로 입력하여 처리하도록 구성하였다.
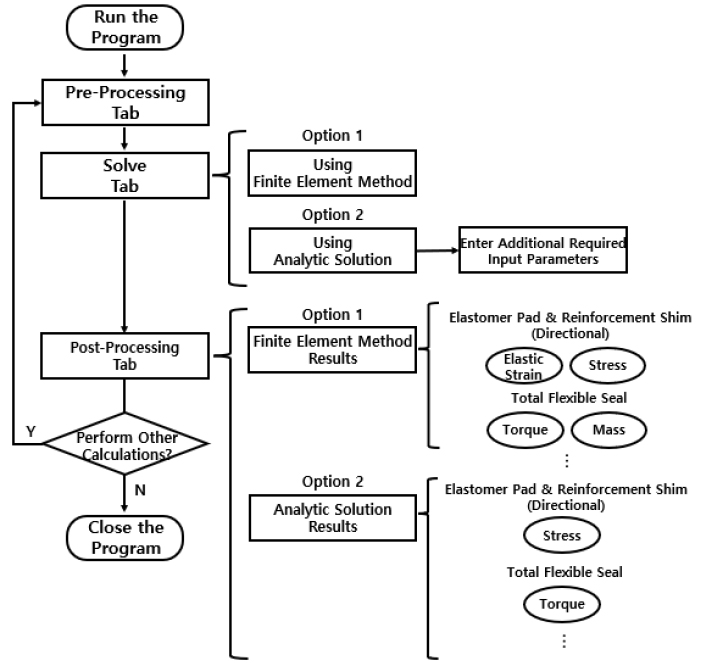
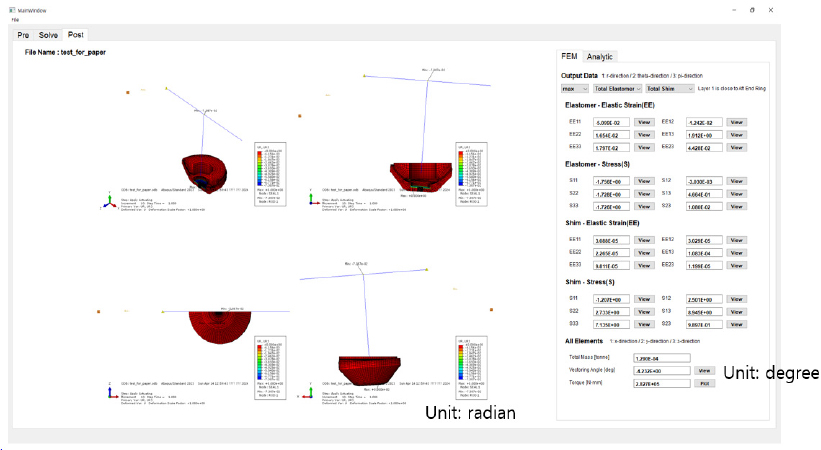
후처리 탭의 경우, Solve 탭에서 유한요소해석 혹은 이론식을 통한 계산 중 어떤 것을 수행했는지에 따라 사용자가 결과 값을 선택해서 볼 수 있게 구성되었다. 유한요소해석의 결과값으로는 구면 좌표계에서 정의된 반지름, 위도, 경도 방향에 따른 강화용 심, 탄성 중합체 패드의 응력 및 변형률과 플렉서블 씰의 작동 토크를 포함하였으며, 이를 그림 혹은 그래프 등과 같은 시각적 도구로 나타낼 수 있도록 하였다. 이론식을 통한 계산의 주요 결과값은 탄성중합체 패드의 전단 응력, 강화용 심의 압축 후프 응력과 작동 토크를 포함한다.
이와 같은 방식으로 구성된 프로그램 GUI 화면을 Fig. 10, 11, 12에 나타내었다. Fig. 10은 프로그램의 전처리 탭의 형상 설계 변수 입력 창을, Fig. 11은 Solve 탭, Fig. 12는 후처리 탭의 예시를 나타낸다.
2.4 프로그램 구조 해석 검증
설계자가 직접 CAD 도면을 작성하고 이를 기반으로 유한요소 해석 모델을 만들어서 해석을 수행하는 기존의 설계 해석 과정을 통해 얻은 해석 결과와, 플렉서블 씰 설계 자동화 프로그램을 이용하여 얻은 해석 결과를 비교하고, 동일 결과 산출 여부를 고찰하였으며, 이를 통해 본 연구의 설계 자동화 프로그램과 기존 설계해석 과정의 동등성을 검증하였다.
동등성 검증을 위해 동일한 형상 설계 변수와 물성 및 하중 관련 조건을 부여하였으며, 구동기 동력을 모사한 하중 및 경계 조건을 부여하였다. 검증을 위한 해석에서는 벡터링을 모사하기 위해 피봇 점에 90,000 N-mm의 모멘트를 가하였다.
Fig. 13에 나타난 바와 같이, 유한요소해석의 형상 경계 조건은 연산 효율을 위해 XY 평면 대칭 조건을 적용하였다. 후방링의 윗면은 XYZ 3방향을 구속하였으며, 피봇 점의 경우 벡터링에 대한 해석 절차를 수행할 때 Z방향 회전 외의 움직임이 피봇 점에서 일어나지 않도록 하였다. 해석 모델의 요소 개수는 65,204개이며, 모델을 구성하는 파트의 종류 및 요소 개수는 Table 2에 나타내었다. 플렉서블 씰 모델을 구성하는 각 파트와 그 위치는 Fig. 4에서 확인할 수 있다.
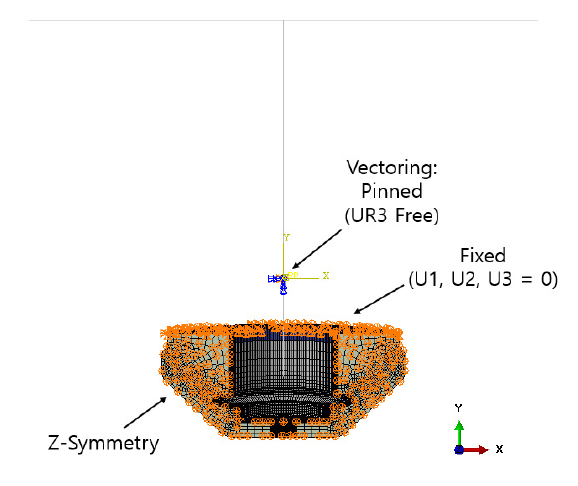
Table 2.
Part types and number of elements in each part of flexible seal.
| Part | Ring(After, End) | Reinforcement shim | Elastomer pad | T-Rod |
| Number of elements | 52,400 | 5,120 | 7,680 | 4 |
Table 3에는 기존의 설계 해석 방법을 이용하여 얻은 해석 결과와 본 연구에서 개발된 플렉서블 씰 설계 자동화 프로그램을 사용하여 얻은 해석 결과를 비교하였다. 플렉서블 씰을 구성하는 탄성중합체 패드와 강화용 심에서 발생하는 최대 응력값을 유한요소 적분점에서 추출하여 방향 별로 각각 비교한 것으로서 그 결과의 동등성을 확인할 수 있다.
Table 3.
Comparison of the analysis results(Standard manual analysis procedure vs. Design automation program).
설계, 유한요소해석 전처리(해석 정보 입력), 해석 수행, 후처리 과정(해석 결과 파일에서의 데이터 수집)을 모두 포함하였을 때, 해당 업무를 수작업으로 수행함에 있어 플렉서블 씰 설계해석에 대한 숙련도가 높은 연구자의 경우에도 5시간 이상이 소요되었다.
하지만 본 연구에서 개발한 자동화 프로그램을 사용할 경우, 설계자가 유한요소해석 소프트웨어에 익숙하지 않은 경우일지라도 쉽고 빠르게 플렉서블 씰에 대한 설계해석을 수행할 수 있다(본 절 예제의 경우 설계해석 소요시간: 2분).
이렇게 실제로 수작업을 통해 수행하는 설계해석 과정과 비교할 때 수작업에 들이는 노력과 시간을 훨씬 단축할 수 있을 뿐만 아니라, 설계안 변경에 따라 반복적으로 이루어져야 하는 설계 작업의 특성을 고려할 때 그 효율성은 더욱 커질 수 있다.
나아가 본 연구에서 개발된 자동화 프로그램을 민감도 계산이나 최적화 설계 과정에 활용할 경우 그 유용성은 더더욱 배가 될 수 있다.
2.5 작동 토크량 – NASA 문헌과의 비교 검증
본 절에서는 문헌 [1]의 스프링 토크(Spring Torque, 이때 문헌 [1]의 스프링 토크는 개발된 설계 자동화 프로그램의 작동토크에 해당됨) 이론값과 본 프로그램에서 계산된 작동토크 결과값을 비교하고 이를 통해 그 결과의 유사성을 확인하였다.
문헌 [1]에 따르면, 플렉서블 씰의 스프링 토크량은 Eq. 1으로 정의된다.
Eq. 1에 사용된 각 변수들의 정의는 Table 4에 나타내었으며, Fig. 14에는 그림을 통해 이를 도시하였다. , 의 경우, 문헌 [1]에 명시된 범위(, ) 내 값인 을 사용하였으며, 의 경우 Table 5에 제시된 값을 사용하였다[1,17].
Table 4.
Definition of parameters in Eq. 1.
| Parameter | Definition |
| (N-mm) | Seal spring torque |
| 𝜃(radian) | Vectoring angle |
| (MPa) | Elastomer secant shear modulus at 50 psi shear stress |
| (mm) | Flexible seal outer diameter |
| (mm) |
Flexible seal inner diameter (=Rin from Table 1) |
| , (deg) | Inner and outer seal angles |
| , | Integal values listed in Table 5 |
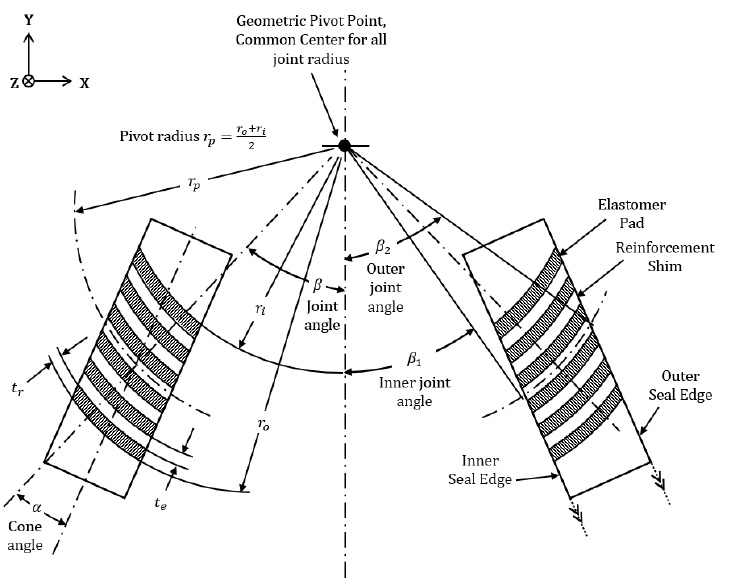
Table 5.
| 𝛽(deg) | |
| 40 | 0.3249 |
| 41 | 0.3389 |
| 42 | 0.3531 |
| 43 | 0.3674 |
| 44 | 0.3818 |
| 45 | 0.3963 |
| 46 | 0.4109 |
| 47 | 0.4256 |
| 48 | 0.4403 |
| 49 | 0.4551 |
| 50 | 0.4700 |
문헌 [1]에 나타난 플렉서블 씰의 형상은 Fig. 14에 도시한 바와 같이 외측 씰 모서리(Outer seal edge)와 내측 씰 모서리(Inner seal edge)가 평행하므로, 이러한 가정과 함께 Table 6에 정의된 형상 설계변수를 사용하면 플렉서블 씰의 형상을 결정할 수 있다. 결과 비교를 위해 결정된 형상에 대한 문헌 [1]의 입력 변수를 변환하여, 본 연구에서 개발된 자동화 프로그램의 입력 변수를 구하고 자동화 해석을 수행하였다. 자동화 프로그램에 입력된 변수는 Table 7과 같다.
Table 6.
NASA geometric design input parameters.
|
NASA Design Input Parameter | |||
|
ri [mm] |
Te [mm] |
Ts [mm] |
Ns [ea] |
| 75.0 | 1.0 | 1.0 | 2 |
|
β1 [deg] |
β2 [deg] |
α [deg] |
β [deg] |
| 40.0 | 50.0 | 7.205 | 45.0 |
Table 7.
Current geometric design input parameters.
|
Program Design Input Parameter (Converted from NASA) | |||
|
Rin(=ri) [mm] |
Te [mm] |
Ts [mm] |
Ns [ea] |
| 75.0 | 1.0 | 1.0 | 2 |
|
R1 [mm] |
R3 [mm] |
α [deg] | Z |
| 48.281 | 57.798 | 7.205 | 1.007 |
Table 7의 형상 설계 변수를 자동화 프로그램에 입력하여 플렉서블 씰을 구성할 경우, 앞서 설명한 Fig. 4와 같은 형상의 유한요소해석 모델이 자동으로 구성된다. 이때 문헌 [1]의 하중 조건에 맞추어 플렉서블 씰에 가해지는 연소 압력 조건은 고려하지 않고, 기하 피봇점에 벡터링에 관련된 토크 하중만을 적용하였다. 또한 벡터링 시에 기하 피봇점의 위치를 고정시키기 위해 피봇점의 X, Y, Z 방향 변위를 고정하는 경계조건을 부가하였다. 기하 피봇점이 위치한 T-Rod는 강체로 모델링 하였으며, Kinematic Coupling 구속 조건을 통해 Forward End Ring과 연결하였다.
위와 같은 하중, 경계 조건이 부여된 플렉서블 씰의 유한요소모델에 대한 작동 토크와 이에 해당하는 벡터링 각도를 산출하였으며, 이를 Eq. 1의 스프링 토크와 비교하였다. 플렉서블 씰 유한요소모델은 XY평면에 대해 대칭인 형상을 가지며, 본 연구에서는 이 중 절반만 모델링 하여 해석을 수행하기 때문에 작동 토크량은 부여된 모멘트의 2배에 해당한다.
프로그램을 통해 산출된 토크는 Fig. 15 우측에 나타낸 바와 같이 GUI 환경 내 Post-processing 탭의 우측 하단에서 확인할 수 있으며, ‘Plot’ 버튼을 클릭하면 Fig. 15 좌측과 같이 벡터링 각도에 따른 작동 토크량을 그래프 형식으로 확인할 수 있다.
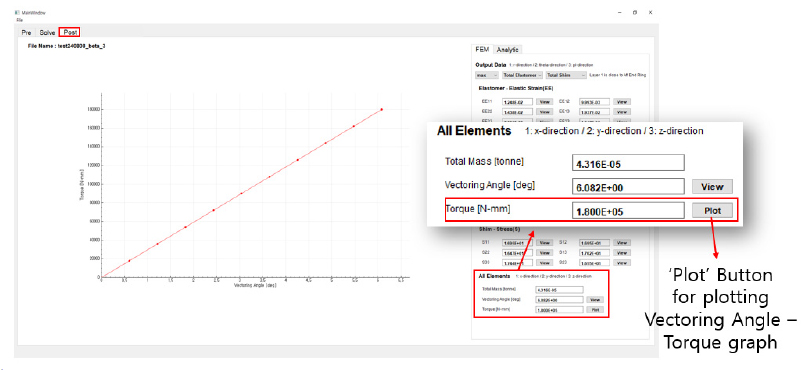
Table 8에 설계 자동화 프로그램과 Eq. 1을 통해 산출한 토크량을 나타내었다. Table 8에 나타난 결과로부터 서로 간의 차이가 최대 1% 이내로 그 결과의 유사성을 확인하였다.
Table 8.
Comparison of vectoring torques(Ref. [1] vs. Design automation program).
| V.A.* [deg] | Torque [N-mm] | Diff.*** [%] | |
| Program | Ref.**[1] | ||
| 0.608 | 1.800E+04 | 1.812E+04 | 0.642% |
| 1.216 | 3.600E+04 | 3.622E+04 | 0.609% |
| 1.825 | 5.400E+04 | 5.436E+04 | 0.663% |
| 2.433 | 7.200E+04 | 7.247E+04 | 0.650% |
| 3.041 | 9.000E+04 | 9.058E+04 | 0.642% |
| 3.649 | 1.080E+05 | 1.087E+05 | 0.636% |
| 4.258 | 1.260E+05 | 1.268E+05 | 0.656% |
| 4.866 | 1.440E+05 | 1.449E+05 | 0.650% |
| 5.474 | 1.620E+05 | 1.631E+05 | 0.645% |
| 6.082 | 1.800E+05 | 1.812E+05 | 0.642% |
3. 결 론
본 연구에서는 플렉서블 씰 설계 효율성을 증진시키기 위해 설계 자동화 프로그램을 개발하였다. Python 프로그래밍 언어와 ABAQUS Application Programming Interface를 통해 플렉서블 씰 유한요소 모델 자동 생성 모듈을 개발하고, 이를 통해 형상 설계 변수 변화에 따라 자동으로 플렉서블 씰 모델을 생성할 수 있도록 하였다. 이 자동 생성 모듈은 세부적으로 자동 유한요소 모델 전처리 기능, 유한요소 해석 연동 기능, 후처리 기능으로 구성되어 있다.
또한, 개발된 모듈의 사용자 편의성을 높이기 위해 Qt 라이브러리를 이용하여 GUI 환경을 구축하였으며, 이를 통해 하나의 통합된 그래픽 사용자 환경 하에서 더욱 손쉽게 자동 모델링, 해석 수행은 물론 성능해석 결과까지 확인할 수 있도록 하였다.
기존의 수작업 의존적인 설계 해석 과정을 통해 얻은 해석 결과와 플렉서블 씰 설계 자동화 프로그램을 이용하여 얻은 해석 결과의 동등성을 입증하기 위해 두 해석과정을 통해 얻은 해석 결과를 비교하였으며 이를 통해 동등성을 입증하였으며, 큰 시간비용 절감도 확인하였다.
또한, 개발된 설계 자동화 프로그램을 통해 얻은 작동 토크와 문헌 [1]의 이론식을 이용하여 얻은 토크를 비교 분석하였다. 이를 통해 두 방법의 유사성을 확인하였으며, 개발된 프로그램의 유효성을 입증하였다.
수작업을 통해 수행하는 플렉서블 씰 설계해석 과정과 비교할 때 본 연구를 통해 개발된 자동화 프로그램을 활용할 경우 수작업에 들어가는 노력과 시간을 아주 많이 단축시킬 수 있으며, 반복적으로 이루어지는 설계 작업의 특성을 고려할 때 그 효율성은 매우 크다고 할 수 있다.
향후 플렉서블 씰 설계민감도 계산에 본 연구를 통해 개발된 플렉서블 씰 설계 자동화 프로그램을 매우 효율적으로 활용할 수 있을 것으로 판단되며, 나아가 플렉서블 씰의 설계 최적화 연구에도 유용하게 활용할 수 있을 것으로 기대된다.
