

1. 서 론
2. 자율운항 우주선 추진시스템
2.1 화학추진시스템
2.2 전기추진시스템
3. 자율운항 우주선 추진시스템 활용 현황
3.1 우주 화물 수송선
3.2 궤도상 서비싱 우주선
3.3 우주 탐사선
4. 결 론
1. 서 론
최근 우주산업은 민간 우주기술 발전, 상업적 활용도 증가, 그리고 우주 임무의 다양화로 인해 급격하게 성장하고 있다. 연간 우주 발사 횟수는 약 200회(2023년 기준)를 넘어섰으며, 이는 꾸준히 증가할 것으로 보인다[1,2]. 이러한 상승 추세에 따라 대규모 군집 통신 위성, 궤도상 서비싱(on-orbit servicing), 달 및 화성 탐사 등 다양한 우주 임무를 수행하는 위성의 수요가 증가하고 있다[1,3].
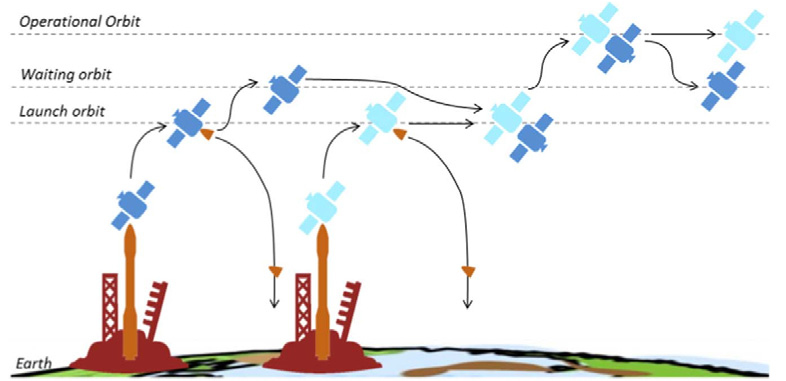
우주 임무의 다양화는 기존의 운용 개념을 넘어서 새로운 임무 수행 방식을 요구한다. 예를 들어, 저궤도 국제우주정거장(International Space Station, ISS)의 물품 공급에 활용된 우주 화물 수송선은 달 궤도 정거장을 시작으로, 심우주 화물선으로 임무 범위가 확장되고 있다[4,5]. 또한, 초소형 위성 증가에 따른 우주쓰레기 제거, 위성 수명 연장 및 유지보수, 연료 재보급과 같은 임무 수행을 위해, Fig. 1과 같이 우주 물체에 접근 및 도킹할 수 있는 능력을 갖춘 우주비행체의 수요가 증가하고 있다[6]. 이와 같은 다양한 미래 우주 임무의 성공적 수행과 운용 효율성을 위해 자율적으로 임무를 수행할 수 있는 우주비행체의 필요성이 부각되고 있다.
자율운항 우주선(autonomous spacecraft)은 온보드 자율성(onboard autonomy)을 기반으로, 지구 관제나 원격 제어 없이도 독립적으로 운용될 수 있는 우주비행체를 의미한다[7,8]. 자율운항의 정도는 지상의 개입 수준에 따라 결정되며, 주어진 임무 시나리오에 따라 자세/궤도 조정, 충돌회피, 자동 접근, 도킹 등 특정 기능을 부분적으로 자율적으로 수행하거나, 전체 임무 수준에서 상황 변화에 따른 세부 임무 계획 수립, 자원 배분 등 운용 전략을 조정할 수 있다[7]. 이러한 자율적 판단과 임무 수행 능력은 우주 물자 수송, 위성 유지보수 등 다양한 실제 운용 시나리오에서 활용될 수 있으며, 특히 우주 환경에서 발생하는 통신 지연, 제한된 지상국 가시성 등 기존 원격 제어 방식이 지니는 제약을 효과적으로 보완한다. 더 나아가, 자율운항 기술은 지상국과의 통신이 제한되거나 불가능한 심우주 환경에서도 인간의 직접 개입 없이 우주선이 임무를 독립적으로 계획 및 수행하도록 하는 핵심 기술이다[7,8,9,10].
자율운항 우주선을 활용한 궤도상 서비싱, 우주 탐사 등 여러 임무를 수행하기 위해서는 궤도 전이 및 근접 기동을 위한 추진시스템이 필수적이다. 특히, 임무에 따라 요구되는 우주선의 제원과 제약 조건이 모두 다르기 때문에, 각 임무에 적합한 추진시스템을 적용하는 것이 중요하다.
따라서, 본 논문에서는 자율운항 우주선에 적용 가능한 추진시스템을 조사하고, 2000년대 이후 운용된 자율운항 우주선 활용 사례와 추진시스템의 연구개발 현황을 기술하여 앞으로의 미래 우주 임무에서 추진시스템 활용도와 개발 방향성을 제시하고자 한다.
2. 자율운항 우주선 추진시스템
우주 추진시스템은 에너지 공급원과 사용 방식에 따라 크게 화학추진(chemical propulsion), 전기추진(electric propulsion), 원자력 추진(nuclear propulsion) 및 무연료추진(propellant-less) 등의 방식으로 구분된다. 현재까지 개발된 우주선에는 주로 화학추진과 전기추진이 활용되었으며, 원자력 추진 및 무연료추진과 같은 방식은 연구 단계에 있다[11,12]. 따라서, 본 논문에서는 화학추진과 전기추진을 중심으로 서술하고자 한다.
2.1 화학추진시스템
화학식 추력기는 추진제의 화학반응에서 발생한 고온, 고압의 가스를 노즐로 팽창시켜 큰 추력을 발생시킨다. 이러한 특성으로 인해 발사, 궤도 전이, 도킹 등과 같이 단시간에 큰 속도 증분(delta-v)이 요구되는 임무에서 주로 활용되며, 특히 비행시간을 최소화해야 하는 유인 탐사 임무에서도 필수적인 역할을 한다. 추진제 종류에 따라 단일추진제, 이원추진제, 친환경 추진제로 구분할 수 있다[13,14].
단일추진제(monopropellant) 추력기는 화학물질이 촉매에 의해 발열 분해되어 생성된 고온의 가스가 노즐을 통해 분사되며 추력을 생성한다[13,14]. 비교적 간단한 구조와 높은 신뢰성, 많은 비행이력을 가지며, 대표적인 연료로는 하이드라진(N2H4), 과산화수소(H2O2) 및 아산화질소(N2O)가 사용된다[13,15]. 추력은 대략 수 N에서 수백 N의 범위를 가지며, 비추력의 경우 일반적으로 200-300 s내외로 형성된다[12,14].
이원추진제(bipropellant) 추력기는 연료와 산화제를 분리하여 저장한 뒤 연소실에서 반응시켜 고온의 가스를 생성해 추력을 생성한다[14]. 높은 추력과 추력 조절, 재점화가 용이하다는 장점을 가지며, 연료의 경우 주로 하이드라진(N2H4), 모노메틸하이드라진(Monomethylhydrazine, MMH)이 사용되고, 산화제의 경우 사산화이질소(Nitrogen Tetroxide, NTO), 혼합질소 산화물(Mixed Oxides of Nitrogen, MON)이 사용된다. 추력은 대략 10 MN까지도 생성될 수 있으며, 비추력의 경우 약 400 s정도이다[14,16].
친환경 추진제(green propellant) 추력기는 기존 단일/이원추진제의 독성, 취급 부담을 줄이면서 성능을 보완한 추진시스템으로, 기존 하이드라진 대비 비추력과 밀도가 높아 HPGP(High Performance Green Propellant) 기술로 분류된다. 연료의 경우 주로 수산화암모늄나이트레이트(Hydroxylammonium Nitrate, HAN), 암모늄 디나이트라마이드(Ammonium Dinitramide, ADN) 및 고농도 과산화수소(High-Test Peroxide, HTP) 계열이 사용된다[17]. 추력 및 비추력의 경우 단일/이원추진제와 비슷한 수준이다[16].
2.2 전기추진시스템
전기추력기는 전기에너지를 이용하여 추진제를 가속하여 추력을 발생시키는 장치로, 화학식 추력기에 비해 추력은 작지만, 높은 비추력을 가져 연료 소모량이 적다는 장점을 가진다[3]. 이러한 특성을 기반으로, 궤도 유지, 정밀기동, 심우주 탐사 등과 같은 임무에서 핵심 기술로 활용되고 있다[3]. 전기추력기는 추진제 가속 방식에 따라 전열추진, 정전추진, 전자기추진으로 구분할 수 있다[3,16].
전열추진(electrothermal)은 전기에너지를 열에너지로 전환하여 추진제를 가열, 팽창시켜 노즐로 배출시켜 추력을 생성한다. 다양한 추진제를 사용할 수 있으며, 단순한 구조를 가진다[3,16]. 추력은 대략 수 mN에서 수 N의 범위를 가지며, 비추력의 경우 100-600 s 정도의 범위를 가진다. 대표적으로 레지스토젯(resistojet) 및 아크젯(arcjet)이 있다.
정전추진(electrostatic)은 방전 채널에서 생성된 플라즈마를 전기장을 통해 가속하여 추력을 생성한다. 정전추진은 가장 많이 사용되고 있는 전기추진 방식으로, 추진제는 주로 제논(Xe), 크립톤(Kr), 아르곤(Ar)과 같은 불활성 기체가 사용된다. 대표적인 추력기로는 홀 추력기(Hall thruster) 및 이온추력기(ion thruster)가 있으며, 추력은 대략 수 mN에서 수 N의 범위를 가진다. 비추력의 경우, 일반적으로 약 1,500-4,000 s의 범위를 가진다[3,16].
전자기추진(electromagnetic)은 방전 채널 내부의 플라즈마를 전기장과 자기장에 의한 로렌츠 힘으로 가속하여 추력을 생성한다. 대표적인 추력기로는 MPDT(Magnetoplasmadynamic Thruster), VASIMR(Variable Specific Impulse Magnetoplasma Rocket) 등이 있으며, 현재 자율운항 임무 활용을 위해 연구개발 단계에 있다. MPDT와 VASIMR는 수십-수백 kW 전력에서 수백 mN-수 N, 비추력은 수천 s의 범위를 가진다. 위의 추력기는 고전력에서 높은 효율을 보이는 것이 특징이며, 추진제로는 제논(Xe), 아르곤(Ar), 크립톤(Kr)과 같은 불활성 기체 외에도 수소(H2), 리튬(Li)등이 사용된다[3,16,18].
3. 자율운항 우주선 추진시스템 활용 현황
본 논문에서는 자율운항 기능을 갖추고 있거나 자율운항에 활용 가능한 사례들을 우주 화물 수송선, 궤도상 서비싱 우주선, 우주탐사선으로 분류하고, 발사 예정 임무를 포함하여 연도별로 정리하였다.
3.1 우주 화물 수송선
3.1.1 ATV(ESA, 2008~2015)
ATV(Automated Transfer Vehicle)는 유럽우주국(ESA)이 개발한 무인 우주 화물선으로, 국제우주정거장에 화물, 연료, 산소, 물 등을 공급하는 임무를 수행하였다. ATV는 ISS와 동일한 궤도면에 진입한 후, 자율적으로 도킹을 수행하고, 도킹 이후에는 자체 추진시스템인 PRSS(Propulsion and Reboost Subsystem)를 활용하여 ISS의 고도와 자세를 조정하며, 폐기물을 적재하여 대기권에서 소각시키는 역할도 수행하였다[19,20].
ATV는 길이 10 m, 직경 4.5 m 최대 발사 중량 20.5 t의 제원을 가지며, 약 7.5 t의 화물을 운반할 수 있고, 형상은 Fig. 2와 같다. 추진시스템은 490 N급 메인 추력기 4기와 220 N급 자세제어 추력기 ACT(Attitude Control Thrusters) 28기로 구성된다. 메인 추력기는 ATV가 아리안 5(Ariane 5)에서 분리된 후, ISS 도킹 궤도까지 궤도 상승 임무를 수행하고, ISS 도킹 상태에서 고도 상승, 그리고 임무 종료 후 ATV를 대기권에 재진입시켜 소각한다. 자세제어 추력기 중 20기는 5기당 한 모듈로 ATV의 후방에 부착되어 있으며, 나머지 8기는 2기당 한 모듈로 전방에 부착되어 ATV의 자세제어, ISS에 도킹하기 위한 기동, 그리고 회피 기동을 수행한다[20,21].
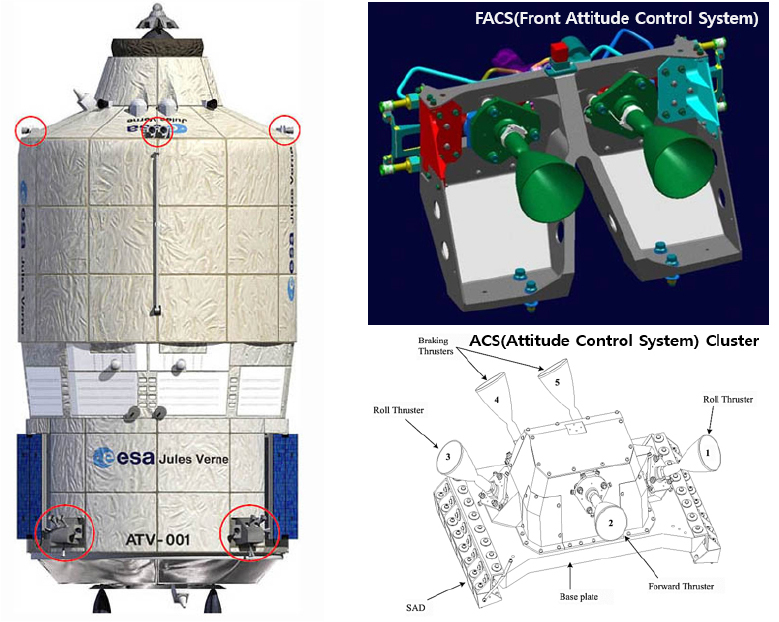
두 추력기 모두 MON/MMH 기반의 이원추진제를 사용하며, 추진제는 연료 탱크 4기, 산화제 탱크 4기에 저장되어 헬륨 가압 탱크를 통해 공급된다. 전체 추진제 탑재량은 최대 6,960 kg이며, 이 중 임무 궤도 기동에 2,880 kg, ISS 기동에 4,080 kg이 사용되도록 설계되어 있다[20]. ATV는 2008년부터 2015년까지 총 5회 임무를 성공적으로 완수하였다[22].
3.1.2 HTV(JAXA, 2009~2020)
HTV(H-II Transfer Vehicle, Kounotori)는 일본 우주항공연구개발기구(JAXA)가 개발한 무인 우주 화물선으로, ISS에 보급품을 운반하는 임무를 수행하였다. HTV가 ISS에 접근하면, ISS의 원격 조작시스템인 SSRMS(Space Station Remote Manipulator System)이 HTV를 포획하여 ISS에 도킹시킨다. 이후, 식량 및 다양한 실험 장비와 같은 보급품을 전달한 뒤, 폐기물을 적재하여 대기권으로 재진입한다. HTV는 Fig. 3과 같이 여러 가지 모듈로 구성되어 있으며, 식량, 실험 장치와 같이 ISS 내부로 옮길 수 있는 가압 화물, 태양전지판 부품이나, 로봇팔 같은 대형 비가압 화물을 동시에 운반할 수 있는 것이 특징이다. 또한, 단순 재보급 임무 외에도 향후 달/행성 착륙, 재진입 임무에 응용이 가능하도록 설계되었다[24,25].
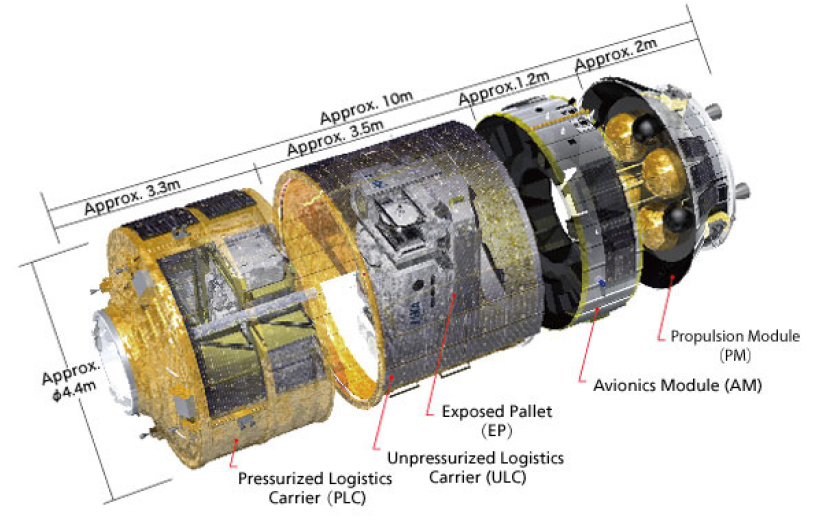
HTV는 길이 10 m, 직경 4.4 m, 최대 발사 중량 16.5 t의 제원을 가지며, 약 6 t의 화물을 운반할 수 있다. 추진시스템은 추력 500 N급 메인 추력기로 Aerojet사의 R-4D 4기와 110 N급 자세제어 추력기 R-1E 28기로 구성된다. 발사체에서 분리 후, 랑데부(rendezvous) 단계, 재진입 단계는 메인 추력기 4기를 통해 이루어지며, 하나의 추력기에 고장이 발생할 경우, 대칭되는 위치의 추력기를 차단하고, 두 기의 추력기를 통해 기동한다. HTV는 반작용휠(reaction wheel)이나 제어 모멘트 자이로스코프(control moment gyroscope)를 갖추고 있지 않아, HTV의 자세제어와 메인 추력기 보조, ISS 근접 운용 및 충돌회피 기동은 모두 자세제어 추력기가 담당한다. HTV의 자세제어 추력기는 전방의 가압 화물 캐리어와 후방 추진 모듈의 주요 구조물에 설치되어 있다. 두 종류의 추력기는 모두 MMH와 MON-3 기반의 이원추진제를 사용하며, 총 2,432 kg의 추진제가 네 기의 탱크에 저장된다. 추진제는 고압 헬륨으로 가압되며, 임무 단계에 따라 압력 조절 모드와 블로우다운(blowdown) 모드를 병행하여 운용된다[24,25,26,27].
2009년부터 2020년까지 총 9기의 HTV가 임무를 성공적으로 수행하고 퇴역하였으며, 후속 기종인 차세대 무인 우주 화물선 HTV-X가 2025년 10월 발사되었다[24,25].
3.1.3 Dragon(SpaceX, 2012~)
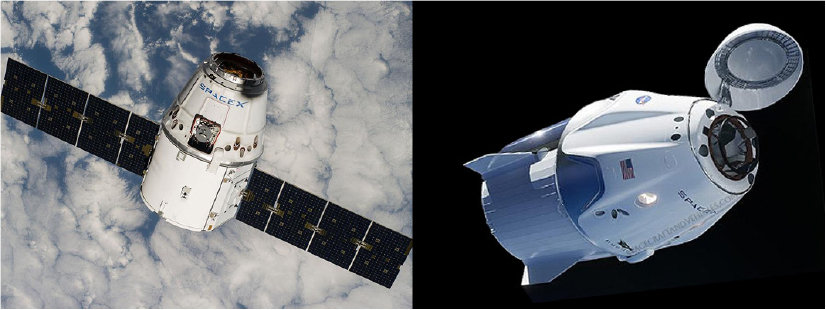
SpaceX의 Dragon 우주선은 ISS에 화물 및 승객을 운송하고, 지구로 복귀할 수 있도록 설계된 상업용 우주선이다. 그중 1세대 모델인 Dragon 1은 당시 운용되던 화물선 중 유일하게 지구로 복귀할 수 있는 화물선이었다. 2세대 모델인 Dragon 2는 승객 탑승 유무에 따라 Crew Dragon과 Cargo Dragon으로 구분되어 설계되었다[29]. Dragon 1과 Dragon 2(Cargo Dragon)의 형상은 Fig. 4와 같다.
Dragon의 화물 모듈은 크게 가압 화물 캡슐과 비가압 화물 트렁크로 구성되어 있다[29,30]. Dragon 1은 길이 6.1 m, 직경 3.7 m, 최대 발사 중량은 약 10 t 내외로 추정되며, Cargo Dragon은 길이 8.1 m, 직경 4 m, 최대 발사 중량 12.5 t의 제원을 갖는다. 두 우주선 모두 약 6 t의 화물을 운반할 수 있다[30,31,32].
Dragon 1과 Cargo Dragon은 추진시스템으로 MMH/NTO 기반 400 N급 Draco 추력기를 각각 18기, 16기 사용하고, 약 1.3 t, 2.5 t의 추진제가 탑재되어 있다. 이와 같은 추진시스템을 통해 발사체로부터 분리 후 ISS 접근, 궤도 조정 및 자세제어, 대기권 재진입 시 낙하산의 사출전 롤(roll)제어를 수행한다[29,31,33,34].
Dragon 1은 NASA의 CRS(Commercial Resupply Services) 프로그램 아래 2012년부터 2020년까지 총 20회의 화물 운송 임무를 수행하였다[35,36]. Dragon 2는 2020년 12월부터 기존 Dragon 1을 대체하여 임무를 수행하고 있으며, 현재까지 총 13회 운용되었다[37,38].
3.1.4 Tianzhou(CNSA, 2017~)
톈저우(Tianzhou)는 중국국가항천국(CNSA)이 운용하는 무인 우주 화물선으로, 중국 우주정거장 톈궁(Tiangong)에 화물, 연료, 실험 장비 등을 공급하는 임무를 수행한다. 톈저우는 발사 후 톈궁과 동일한 궤도면에 진입한 뒤, 자율적인 궤도 기동과 정밀 도킹을 수행할 수 있다. 도킹 이후에는 톈궁의 궤도 상승, 회피 기동과 더불어 궤도상 연료 재보급을 수행할 수 있고, 임무 종료 시에는 폐기물을 적재한 후 대기권에서 소각된다[41].
톈저우는 길이 10.6 m, 직경 3.35 m, 최대 발사 중량 13.5 t으로 설계되었으며, Fig. 5와 같이 화물 모듈, 추진 모듈로 구성되어 있다. 화물 모듈에는 의류, 식량, 물 등 가압/비가압 화물이 포함되며, 최대 6.5 t의 화물을 적재할 수 있다. 추진 모듈은 길이 3.2 m, 직경 2.8 m의 실린더 형상으로, MMH/NTO 기반의 이원추진제를 활용하는 추력 490 N급 메인 추력기 4기와 자세제어를 위한 총 32기의 추력기(25 N, 120 N, 150 N급)로 구성되어 있다. 메인 추력기는 톈저우의 궤도 변경과 도킹 후 톈궁의 궤도를 상승시키는 역할을 한다. 자세제어 추력기 중 16기는 화물 모듈의 전방과 추진 모듈 후방부에 배치되어 있어, 우주선의 기동성을 확보할 수 있다. 톈저우는 자세제어와 궤도제어를 동시에 수행할 수 있으며, 피드포워드(feedforward) 보상에 기반한 고정밀 위치 및 자세제어를 통해 근거리에서 안전한 랑데부 및 근접 비행을 수행할 수 있다[41].
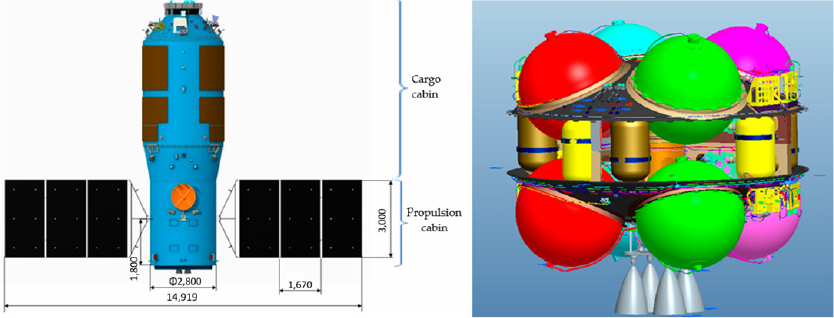
추진제의 저장은 Fig. 5와 같이 하나당 400 L의 용량을 가진 연료 재보급용 탱크 4기, 추진 모듈용 탱크 4기가 상하부에 탑재되어 있다. 최대 3.5 t의 추진제를 적재할 수 있으며, 이 중 약 2.5 t은 톈궁의 연료 보급에 사용된다[41,42]. 톈저우는 2017년 첫 임무를 시작으로 현재까지 9차례 임무를 성공적으로 수행하며 중국 우주정거장 톈궁의 운영을 지원하고 있다[41].
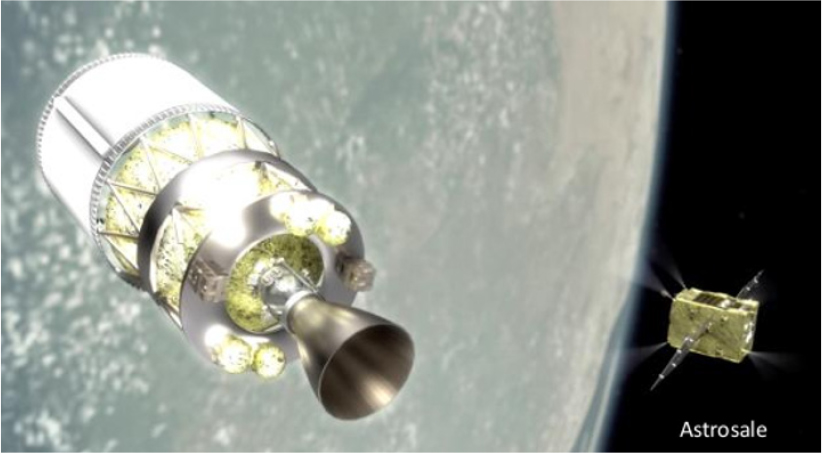
3.1.5 Lunar Gateway CMV(NASA, 예정)
Lunar Gateway는 NASA가 주도하는 Artemis 프로그램의 핵심 구성 요소 중 하나로, 달 궤도에 유인 우주정거장을 건설하는 국제협력 임무이다. Lunar Gateway 중 최초로 발사되는 모듈은 CMV(Co-Manifested Vehicle)로, 이는 HALO(Habitation and Logistics Outpost)와 PPE(Power and Propulsion Element)로 구성되어 있으며, 형상은 Fig. 6과 같다. HALO는 우주비행사에게 거주 환경을 제공하며, PPE는 CMV가 달 궤도에 도달할 수 있도록 한다. PPE와 HALO의 발사 질량은 각각 약 9 t으로 설계되었다. PPE는 ROSA(Roll-Out Solar Array) 기반 태양전지를 탑재하여 최대 60 kW의 전력 생산이 가능하며, 전체 크기 약 20 × 19 × 43 m3, 총 무게 약 63 t에 달하는 유인 우주정거장의 전력 공급과 궤도 기동을 담당할 예정이다[43,44,45].
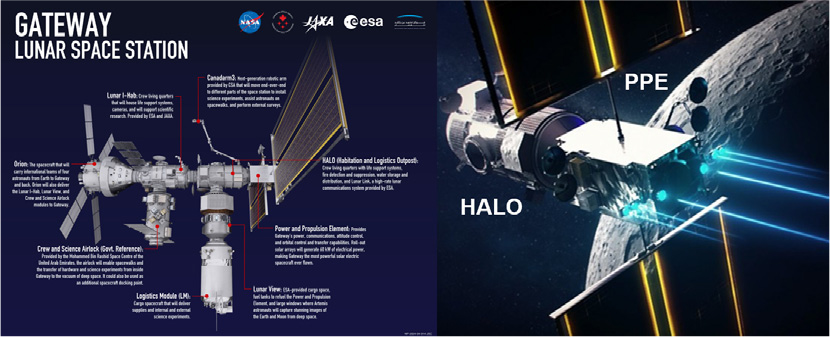
PPE에는 전기추진시스템과 화학추진시스템 모두 포함되어 있다. 전기추진시스템은 CMV가 발사체에서 분리된 이후 달 근처 궤도(Near Rectilinear Halo Orbit, NRHO)로 진입시키고, 이후 Gateway 운용 중 궤도를 유지하는 역할을 한다. 전기추진시스템은 NASA와 Aerojet Rocketdyne이 개발하고 있는 12 kW급 홀 추력기인 AEPS(Advanced Electric Propulsion System) 3기와 Busek사의 6 kW급 홀 추력기인 BHT-6000 4기로 구성되어 있다. AEPS 추력기와 BHT-6000은 각각 약 500 mN, 200 mN의 추력 성능을 가지며, 총 7기의 홀 추력기를 동시에 작동시킬 때 최대 2.3 N의 추력, 2,600 s의 비추력을 가진다. AEPS 추력기 3기 중 2기는 2축 짐벌에 각각 고정되어 있고, BHT-6000는 각각 2기씩 2축 짐벌에 고정되어 있어 궤도 변경 및 자세 유지를 동시에 수행할 수 있다[43,46].
7기의 홀 추력기는 모두 제논을 추진제로 사용하며, 825 L 용량의 탱크 2기에 약 2,770 kg의 제논이 저장되어 있고, 이는 궤도상에서 재급유가 가능하다[43].
화학추진시스템은 총 24기의 MMH/MON-3 기반의 이원추진제 추력기로 구성되며, 발사체 분리 직후 초기 자세 안정, 달 궤도 진입 보조, 자세제어 및 모멘텀 덤핑, 회피 기동 등 즉각적 반응을 하거나 짧은 시간에 큰 속도 증분이 필요한 상황에 활용된다[43,47].
CMV는 2027년에 SpaceX Falcon Heavy 로켓을 통해 발사될 예정이다. AEPS 추력기의 지상 시험 및 인증 절차가 진행 중이며, 발사 이후 최소 15년 이상 운용될 계획이다[43,48].
3.2 궤도상 서비싱 우주선
3.2.1 MEV(NGC, 2019, 2020)
MEV(Mission Extension Vehicle)는 NGC(Northrop Grumman Corporation)에서 개발한 세계 최초의 상용 우주 견인선이다. MEV는 궤도상에서 목표 위성에 자율적으로 접근하여 도킹을 수행한 뒤, 해당 위성의 자세제어와 궤도 변경을 대신 수행함으로써 연료가 소진된 위성의 임무 수명을 연장할 수 있도록 설계되었다[50,51].
MEV-1과 MEV-2의 질량은 각각 2,330 kg과 2.875 kg이다. 추진시스템은 전기추진과 화학추진 모두 활용하며, 구성은 Fig. 7과 같다. 전기추진시스템은 전력 3 kW, 추력 0.18 N급 XR-5 홀 추력기 4기로 구성되며, TPA(Thruster Pointing Assembly)를 통해 추력 벡터를 조절할 수 있다. 이를 통해 정지궤도 전이 및 목표 위성 접근, 도킹 이후 궤도 이동 및 유지를 수행한다. 화학추진시스템은 하이드라진 기반의 단일추진제를 사용하며, 근접 비행, 자세제어 및 도킹 단계에서 6 자유도 제어가 가능하다.
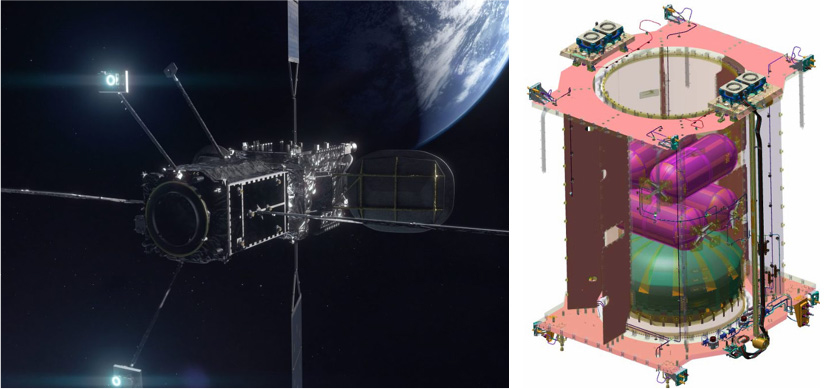
홀 추력기의 추진제로는 제논이 사용되며, 이는 각각 229 kg 이상의 제논이 수용 가능한 탱크 총 4기에 저장된다. 하이드라진 탱크는 제논 탱크와 함께 Fig. 7과 같이 배치되어 있다[50,51].
MEV-1은 2019년 10월에 발사되어 2020년 2월 Intelsat901과 도킹에 성공하였으며, 이후 약 5년간 임무를 수행한 뒤 2025년 4월 분리되어 임무를 종료하였다. MEV-2는 2020년 8월에 발사되어 2024년 4월 Intelsat 10-02와 도킹하였고, 현재 정지궤도에서 임무를 수행 중이다[51,52].
3.2.2 ION SCV(D-Orbit, 2020~)
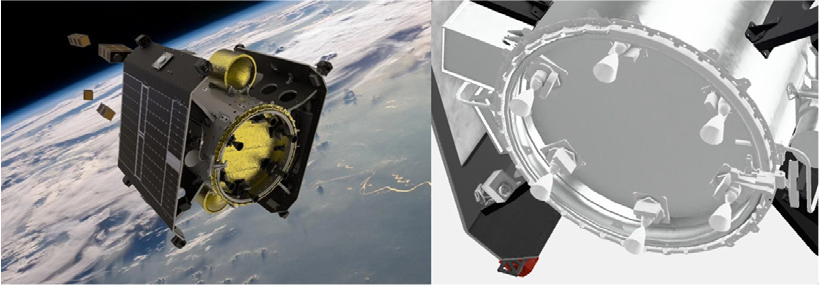
ION Satellite Carrier는 이탈리아의 D-Orbit사가 개발 및 운용하는 위성 배치 플랫폼으로, 발사체가 제공한 공통 궤도에서 다수의 소형 위성을 원하는 목표 궤도로 정밀하게 배치하는 라스트 마일 딜리버리(last-mile delivery) 임무를 수행한다. 또한, 변경할 수 있는 페이로드 베이(payload bay)를 갖추어 큐브위성 규격 페이로드, 마이크로위성, 렌즈나 안테나 같은 궤도상 시험용 장비를 탑재할 수 있다[54,55].
본체는 0.4 × 0.4 × 0.4 m3 크기의 정육면체 구조를 가지며, 최대 발사 중량은 500 kg으로 설계되었고, 최대 200 kg까지 페이로드를 적재할 수 있다. 운용 가능 고도는 추진시스템 없이 450−700 km, 추진시스템이 작동 시, 400−2,000 km이다. 추진시스템을 통해 각각의 위성을 맞춤형 궤도에 배치할 수 있으며, 탑재된 페이로드를 최적 운용 위치에서 운용할 수 있다. 추진시스템으로는 Fig. 8과 같이 Dawn Aerospace가 개발한 B20 추력기 6기가 있으며, 이를 활용하여 궤도 변경, 자세제어 기동을 수행한다. B20 추력기는 아산화질소(N2O)와 프로펜(C3H6) 기반의 친환경 추진제를 활용하며, 최대 18 N의 추력, 271 s 이상의 비추력을 가진다[54,55,56,57,58].
ION Satellite Carrier는 저궤도에서 3년 이상 작동하도록 설계되었으며, 궤도상 위성 배치 이후에도 신장비 실험, 데이터/우주선 슬롯 임대, 우주 클라우드 컴퓨팅과 같이 2차 활용이 가능하다[54,55].
첫 임무인 Origin은 2020년 9월 성공적으로 수행되었으며, 이후 다수의 상업 운용 미션을 지속적으로 수행하고 있다. 2025년 6월까지 18차례의 상업적 임무를 성공적으로 수행하였다[54,55,59].
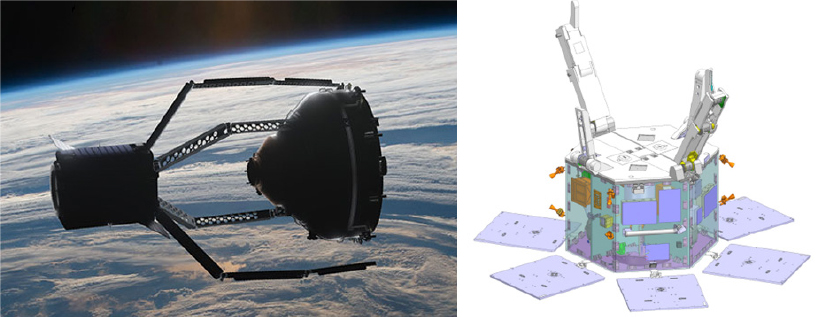
3.2.3 ADRAS-J(Astroscale, 2024)
ADRAS-J(Active Debris Removal by Astroscale-Japan)는 JAXA의 CRD2(Commercial Removal of Debris Demonstration)의 1단계 사업으로, 대형 우주쓰레기를 대상으로 근접 접근 및 정밀 관찰한 최초의 상업적 시도이다. ADRAS-J는 2024년 발사되었으며, Fig. 9와 같이 길이 11 m, 직경 4 m, 약 3 t의 H-IIA 로켓 상단부에 15 m까지 접근하여 표면 상태, 구조 손상 여부 등을 정밀관찰하는 임무를 수행하였다[60].
ADRAS-J는 길이 1.2 m, 너비 0.8 m, 최대 발사 중량 약 150 kg으로 설계된 우주선으로, 친환경 추진제인 ADN 기반의 1 N급 추력기 12기를 탑재하여 랑데부 및 근접 운용 임무를 수행한다. 추진제 공급은 블로우다운 방식으로 이루어진다[60,61,62,63].
2029년에는 ADRAS-J의 후속 임무로 ADRAS-J2가 로봇팔을 활용하여 H-IIA를 포획하고, 대기권에 진입하여 소각시키는 임무를 수행할 예정이다[60].
3.2.4 ClearSpace-1(ESA, 예정)
CS-1(ClearSpace-1)은 ESA가 위탁하고, OHBSE사가 주도하는 최초의 비협조적(uncooperative) 물체를 제거하는 임무이다. 기존의 임무는 2013년에 발사된 VESPA(VEGA Secondary Payload Adapter) 상단부를 회수하는 것이었으나, VESPA가 궤도에서 다른 우주쓰레기와 충돌하여 위험성이 커져 2024년에 목표를 변경하였다. 첫 임무 개시는 2029년 예정으로, 500-700 km의 저궤도를 공전하는 95 kg급 PROBA-1 위성을 궤도에서 회수 및 대기권으로 유도해 소멸시킬 계획이다[64,65,66].
CS-1 위성은 길이 1.3 m, 너비 1.6 m, 최대 중량 580 kg의 제원을 가지며, 형상은 Fig. 10과 같다. 전면 4기의 로봇팔 캡쳐 장치를 기반으로 표적의 자세, 속도에 맞춰 감싸는 방식으로 포획한다. 친환경 추진시스템을 활용하여 발사 직후 궤도 변경, 타겟 접근, 충돌회피, 포획 후 안정화, 탈궤도 기동까지 전 과정을 수행한다[67,68].
CS-1은 발사체에서 분리된 후 목표 타겟의 궤도면으로 진입한다. 원거리, 중거리, 근거리 근접으로 나뉘며, 최종 접근 후에는 최대 3회 포획을 시도한다. 포획된 위성은 단계적 고도 저하 및 재진입 순서로 유도되며 소각된다[67,68].
CS-1의 임무기간은 약 1년으로 계획되어 있으며 종료 후 5년 이내 자연 재진입을 목표로 한다. 2029년 발사가 예정되어 있다[68].
3.2.5 Space Drone(ESS, 예정)
Space Drone은 Effective Space Solutions가 개발한 상업 우주 견인선으로, 연료가 소진된 정지궤도 위성에 비침투(non-intrusive) 방식으로 체결한 뒤, 궤도 유지와 자세제어를 대신 수행한다. 또한, 필요에 따라 위성의 궤도를 재배치하고, 임무 종료 시, 위성을 폐기하는 임무를 수행할 수 있다[70,71].
Space Drone은 발사 중량 400 kg, 0.9 × 1.1 × 1.6 m3 크기의 소형 위성으로 설계되었으며, 추진시스템은 전기추진시스템과 냉가스 추력기(cold gas thrusters)로 구성된다. 전기추진시스템은 추력 15 mN, 비추력 2600 s, 전력 450 W 수준의 성능을 가지는 Arclight RIT(RF Ion Thruster) 4기로 구성된다. Fig. 11과 같이 4개의 스티어링 암 끝단에 추력기를 각각 배치하여 추력 벡터를 조절할 수 있고, 이를 통해 궤도 상승 및 재배치 임무를 수행할 수 있다[70,71,72].
Space Drone은 발사체 분리 직후 전기추진시스템 단독으로 장거리 이송 및 궤도 상승을 수행한다. 근접 단계에서의 제어는 전기추진시스템과 냉가스 추력기가 함께 사용되며, 도킹 단계에서는 냉가스 추력기 단독으로 임무를 수행하도록 설계되었다[71].
설계수명은 약 15년으로 명시되어 있으며, 현재까지 궤도 임무 수행 이력은 없다[73].
3.3 우주 탐사선
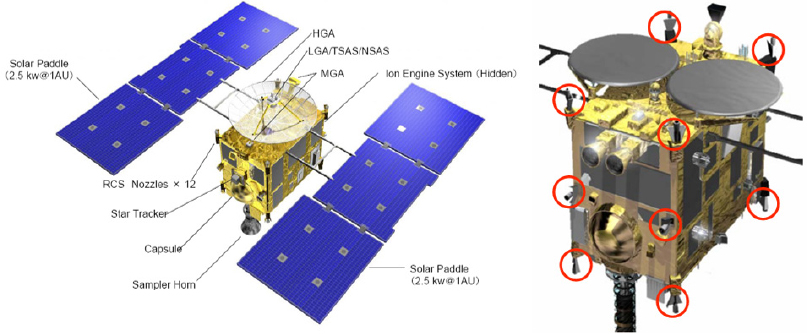
3.3.1 Hayabusa(JAXA, 2003, 2014)
Hayabusa는 일본 JAXA가 운용한 소행성 탐사 및 샘플 귀환 임무로, Hayabusa-1,2가 있다. 두 탐사선 모두 장기간의 행성 간 항행을 위해 이온 추력기를 핵심적인 추진시스템으로 활용하였다[74,75].
Hayabusa-1,2는 각각 발사 질량 약 510 kg, 600 kg을 가지며, 1.0 × 1.6 × 1.1 m3, 1.0 × 1.6 × 1.25 m3 크기를 가진다. 메인 추진시스템은 4기의 μ10 이온 추력기로 구성되며, 각 추력기는 350 W 수준의 전력에서 약 8-10 mN의 추력과 약 3,000 s의 비추력을 가진다[76,77,78].
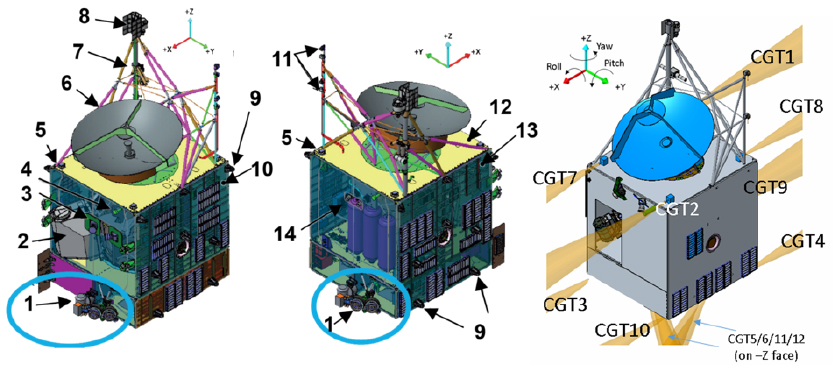
Hayabusa-1과 Hayabusa-2 임무에서 자세제어, 소행성 근처에서의 정밀 궤도 수정, 최종 접근 및 이륙 등에는 12기의 20 N급 이원추진제 추력기를 사용한다. Hayabusa-2는 추진제로 하이드라진과 MON-3를 사용하며 Fig. 12와 같이 +Z 방향, -Z 방향 각각 4기씩, +X 방향, -X 방향 각각 2기씩 배치되어 있다[79].
Hayabusa-1 임무의 추진제로는 제논 66 kg이 탑재되었으며, 총 35,000 시간 운용하는 동안 62 kg의 제논을 소모하여 1,900 m/s의 속도 증분을 달성했다. 또한, 소행성 도달 이후, 이원추진제 추력기 추진제의 누출로 인해 탐사선이 통제 불능에 빠지자 이온추력기의 중화기를 냉가스 추력기처럼 운용하여 제논 가스를 미량 분사하였다. 이를 통해 매우 작은 토크를 발생시켰고, 4기의 중화기를 조합 분사하여 자세제어에 성공했다[76].
Hayabusa-2는 류구(Ryugu)로 향하는 동안 총 6,515시간 동안 이온 추력기를 가동했으며, 이를 통해 약 1,015 m/s의 속도 증분을 얻었다. 추력기 4기 중 3기 위주로 운용하여 추력을 발생시켰으며, 필요에 따라 2기 또는 1기를 운용하여 정밀한 궤도 조정을 수행했다. 이 과정에서 소모된 제논 추진제는 약 24 kg이다[78].
2003년 발사된 Hayabusa-1은 2010년 6월 소행성 이토카와(Itokawa) 물질이 담긴 샘플 캡슐을 지구로 성공적으로 귀환시켰으며, 2014년 발사된 Hayabusa-2는 2020년 12월 소행성 류구 샘플 캡슐을 지구에 전달했다. 이후 Hayabusa-2는 확장 임무에 돌입하여 현재 항행 중이다[75,80].
3.3.2 BepiColombo(ESA/JAXA, 2018)
BepiColombo는 수성의 대기권, 지표면, 자기장 등 우주환경에 대한 조사 및 측정하는 수성 탐사 임무로, ESA와 JAXA의 공동연구로 진행되었다. BepiColombo는 MPO(Mercury Planetary Orbiter), MMO(Mercury Magnetospheric Orbiter), MTM(Mercury Transfer Module) 총 3개의 모듈로 이루어져 있으며, MPO, MMO는 수성 우주환경 관측, MTM은 MPO, MMO를 수성까지 운반하는 임무를 수행한다[81].
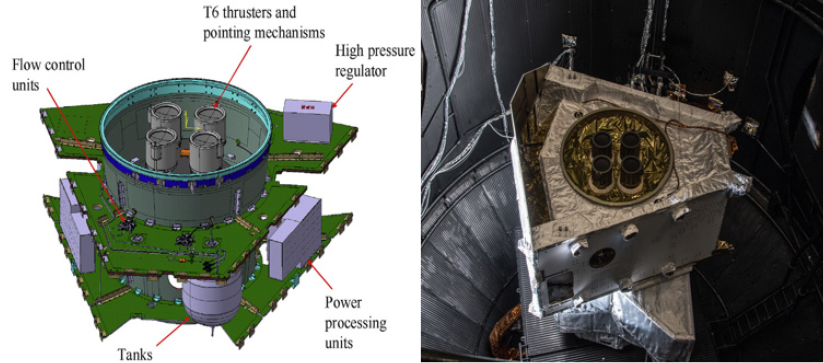
본체 전체는 3.9 × 3.6 × 6.3 m3의 크기를 가지며, 발사 질량은 4,043 kg이다. 이 중 연료가 1,411 kg를 차지한다. BepiColombo의 추진시스템은 모듈별로 각각 다르게 구성되어 있다. MPO에는 하이드라진 연료 기반 5 N급 추력기 4기와 MMH/MON-3 기반 22 N급 추력기 4기가 탑재되어 각각 자세제어, 궤도조정을 수행한다. MMO에는 추력 0.4 N급 질소 냉가스 추력기 6기가 탐사선 측면과 하단에 탑재되어 자세제어에 활용된다. MTM에는 추력 10 N 급 MMH/MON-3 기반 이원추진제 추력기 12기가 배치되어 자세제어를 수행하고, 전력 약 5 kW, 추력 약 125 mN, 비추력 약 4,000 s의 성능을 가진 제논 기반 T6 이온추력기를 통해 총 7년의 비행기간에서 약 650일 동안 작동하여 약 3 km/s의 속도 증분 및 17 MN·s의 임펄스를 제공하였으며, 수성까지의 궤도 전이에 활용된 후 탐사선에서 분리된다[81,82].
BepiColombo는 Fig. 13과 Fig. 14에 나타난 T6 이온추력기 추진시스템을 이용하여 금성, 수성을 근접 비행하며 관측 데이터를 획득하고, 총 3개의 모듈이 각각 분리되어 최종적으로 수성 궤도진입을 목표로 탐사 임무를 수행하고 있다[83].

3.3.3 Tianwen-1(CNSA, 2020)
Tianwen-1은 중국 CNSA가 추진한 화성 궤도선, 착륙선, 로버 통합 탐사 임무로, 궤도선은 관측과 통신을 담당하고, 착륙선 및 로버는 대기권 진입, 감속, 착륙 이후 표면 주행 및 과학 관측을 수행하도록 설계되었다[85,86]. 궤도선 및 착륙선의 형상은 Fig. 15와 같다.
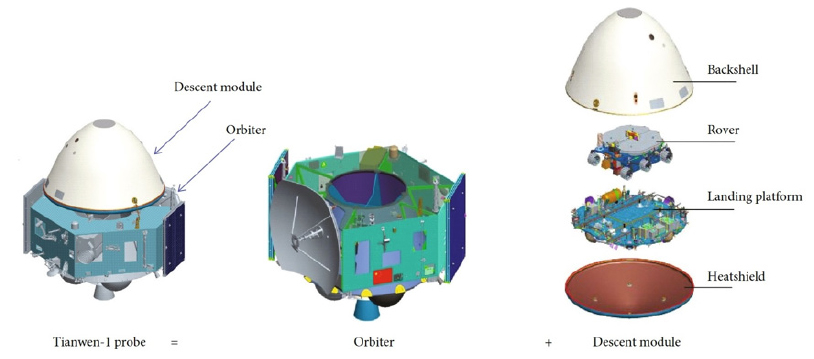
그 중 Tianwen-1 궤도선은 총 질량 약 3,715 kg이며, 탐사를 위한 카메라, 분광기, 레이더 등 과학 탑재체를 운용한다. 추진시스템으로는 3,000 N급 추력을 가지는 메인 추진시스템 1기와 120, 25 N급 보조 추진시스템을 각각 8기, 12기를 가지며, 두 추진시스템 모두 이원 추진제를 사용한다. 메인 추진시스템의 경우 화성 궤도 진입 및 궤도 변경에 사용되고, 보조 추진시스템의 경우 자세제어, 궤도 보정에 사용된다[87,88].
Tianwen-1은 발사체에서 분리된 후 화성궤도 진입을 위한 궤도 전이 과정을 진행하며, 메인 추력기를 기반으로 주차궤도를 조정한다. 궤도를 돌며 착륙선의 착륙 후보지 정찰을 수행하며, 통신 시험을 진행한다. 궤도선은 장기 과학 임무와 통신을 병행하도록 설계되었다[86,88].
2020년 7월에 발사되었으며, 2021년 2월 화성궤도에 진입하여 운용 중이다.[89].
3.3.4 DART(NASA, 2021)
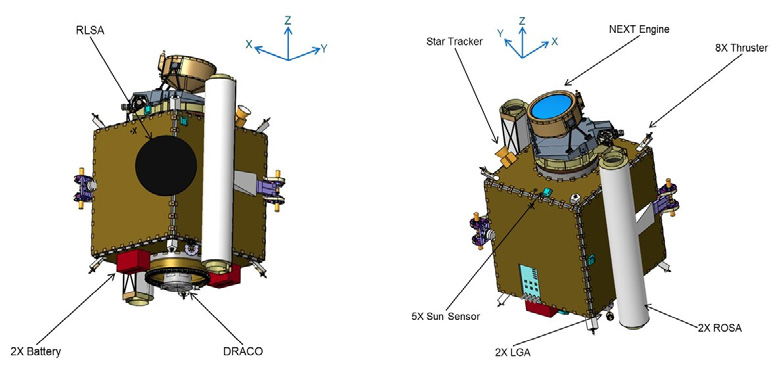
DART(Double Asteroid Redirection Test)는 NASA의 지원으로 Johns Hopkins University Applied Physics Laboratory(APL)이 주관하여 제작한 최초의 행성 방어 실증용 임무로, 목표 소행성과의 직접 충돌을 통해 궤도를 변경하여 지구에 잠재적 위협이 될 수 있는 천체에 대한 편향 기술을 검증하는 것을 목표로 하였다. 또한, NASA의 차세대 이온 추력기 NEXT-C(NASA Evolutionary Xenon Thruster-Commercial) 기술 실증임무도 수행하였다[91,92].
우주선의 발사 질량은 615 kg으로, 1.2 × 1.3 × 1.3 m3 크기의 본체를 가지고 있다. DART 우주선에는 Fig. 16과 같이 하이드라진 추진시스템과 NEXT-C가 탑재되었으나, NEXT- C는 기술 실증만 이루어졌으며, 주요 임무는 하이드라진 기반 단일추진제 시스템으로 수행되었다. 하이드라진 추진시스템은 총 12기의 1 N급 Aerojet MR-103G 추력기로 구성되며, 자세제어, 행성 간 전이 기동, 최종 접근 궤도 보정 기동을 담당하였다. 총 50 kg의 하이드라진 추진제가 탑재되어 임무를 수행하는 동안 총 55.2 m/s의 속도 증분을 발생시켰다[93,94].
DART는 2021년 11월 24일 SpaceX Falcon 9으로 발사되어 약 10개월 간 항행한 뒤, 2022년 9월 26일 근지구 이중 소행성계 중 Dimorphos에 충돌하였다. 이를 통해, Dimorphos의 공전 주기가 약 33분 단축되었으며, 초기 목표였던 최소 73초 단축 요구치를 상회하였다. 후속 임무로, ESA가 2024년 발사된 Hera를 통해 DART 충돌로 인한 궤도 및 Dimorphos의 표면 변화를 정밀 분석할 예정이다[91,92,95].
3.3.5 다누리(KARI, 2022)
다누리(Danuri)는 한국 최초의 달 궤도 탐사선으로, 달 표면으로부터 100 km 고도를 비행하며 달 표면의, 자기장, 방사능 등 달 환경을 조사하는 임무를 수행한다[97].
탐사선의 발사 질량은 678 kg로, 1.82 × 2.14 × 2.29 m3 크기의 본체를 가진다. 추진시스템은 가압기체 탱크, 압력조절부, 추진제 탱크, 연료격리부, 궤도 전이 추력기와 자세제어 추력기 등으로 구성되어 있으며, 형상은 Fig. 17과 같다. 추력기는 모두 하이드라진 추진제 기반의 단일추진제 추력기를 활용하며, 30 N급 궤도 전이 추력기 4기, 5 N급 자세제어 추력기 8기가 장착되어 있다. 이를 통해, 다누리가 발사체로 분리된 후 달 궤도에 진입하도록 하며, 달 궤도에서의 고도유지 및 자세제어 임무를 수행한다[97,98,99].
추진제 탱크에는 총 260 kg의 추진제가 탑재되었으며, 탐사선의 연료 소모량을 최소화하기 위해 탄도형 달 전이 궤도(Ballistic Lunar Transfer Trajectory)를 활용하여 약 4개월에 걸쳐 달 임무 궤도에 진입하였다. 이는 직접 전이 방식에 비해 약 25%의 요구 속도 증분을 감소시켰다[97].
다누리는 2022년 8월 발사되어 기존 계획이었던 1년간의 임무를 성공적으로 수행하였고, 2025년 12월, 2027년 말 차례로 임무 기간이 연장되었다. 최종적으로, 달착륙과 유사한 고도까지 낮추어 착륙에 필요한 기술을 시험한 뒤 2028년 3월에 달에 충돌할 계획이다[97,100].
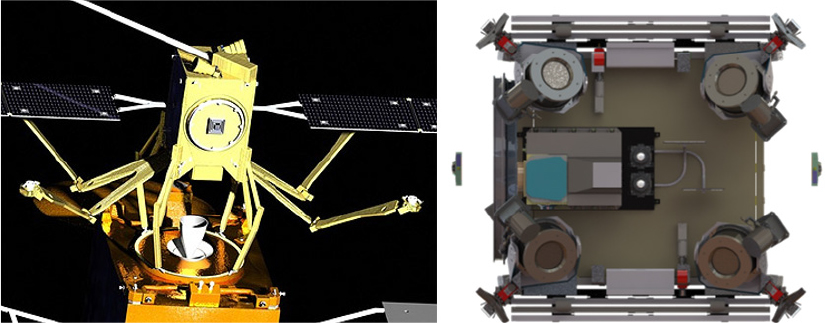
3.3.6 Psyche(NASA, 2023)
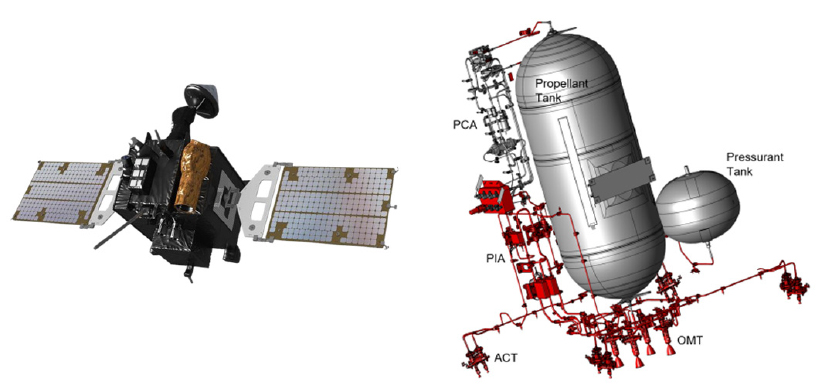
Psyche는 NASA와 Maxar Technologies가 제작한 SSL-1300 버스를 기반으로 한 소행성 탐사용 궤도선으로, 금속으로 이루어진 소행성 16 Psyche의 조성, 지질학적 기원 및 자기장을 연구하기 위해 설계된 우주선이다. Psyche는 태양전지 기반 전기추진시스템을 활용하여 지구 궤도를 벗어나 소행성대까지 장기간 자율 항행을 수행하도록 설계되었으며, 이는 NASA Discovery Program의 일환으로 추진된 임무이다[101,102].
우주선 본체는 약 2,608 kg의 질량을 가지며, 이 중 약 922 kg이 제논(Xe) 추진제로 탑재되었다. 태양전지는 최대 20 kW의 전력을 공급하며, 추진시스템은 SPT-140 홀 추력기 4기로 구성된다. 각 추력기는 전력 4.5 kW 조건에서 추력 약 280 mN, 비추력 약 1,800 s의 성능을 가진다. 4기의 추력기는 Fig. 18과 같이 본체 측면에 장착되어, 궤도 변경, 소행성 궤도 진입 및 속도 증분 확보를 수행한다. 우주선의 자세제어 및 비상 기동을 위해 제논을 활용한 냉가스 추력기 시스템을 활용하고자 하였으나, 냉각, 추력 한계 등의 문제로 인해 최종적으로 질소 냉가스 추력기 시스템이 채택되었다. 이는 추력 0.5 N, 비추력 70 s 성능의 추력기 12기로 구성되어 있으며, Fig. 18과 같이 배치되어 있다[102,103,104,105].
Psyche는 2023년 10월 13일 SpaceX Falcon Heavy 로켓으로 발사되어 현재 태양 궤도에서 순항 중이며, 2029년 8월 소행성에 도착해 약 21개월간 궤도 탐사 및 과학 임무를 수행할 예정이다[106].
4. 결 론
본 논문에서는 자율운항 우주선 및 우주탐사에 활용되는 화학 및 전기추진시스템을 조사하고, 임무 유형에 따라 우주 화물 수송선, 궤도상 서비싱 우주선, 우주탐사선으로 구분하여 추진시스템 활용 현황을 살펴보았으며, 이를 Table 1에 정리하였다.
Table 1.
Summary of propulsion system of the autonomous spacecrafts.
| Space cargo | |||
| Mission |
Spacecraft spec. (Mass & Size) | Propulsion system | |
| Main | Auxiliary | ||
|
ATV (ESA, 2008~2015) |
20.7 t 10.3 m × 4.5 m |
Bipropellant (MMH/MON) 490 N × 4 |
Bipropellant (MMH/MON) 220 N × 28 |
|
HTV (JAXA, 2009~2020) |
16.5 t 10 m × 4.4 m |
Bipropellant (MMH/MON-3) 500 N × 4 |
Bipropellant (MMH/MON-3) 110 N × 28 |
|
Dragon-1,2 (SpaceX, 2012~) |
10/12.5 t 6.1 m × 3.7 m 4.0 m × 8.1 m |
Bipropellant (MMH/NTO) 400 N × 18 400 N × 16 | - |
|
Tianzhou (CNSA, 2017~) |
13.5 t 10.6 m × 3.35 m |
Bipropellant (MMH/NTO) 490 N × 4 |
Bipropellant (MMH/NTO) 25/120/150 N × 32 |
|
Lunar Gateway CMV (NASA, planned) |
18 t N/A* |
Hall thruster 500 mN × 3 200 mN × 4 |
Bipropellant (MMH/MON-3) N/A × 24 |
| On-orbit servicing spacecraft | |||
| Mission |
Spacecraft spec. (Mass & Size) | Propulsion system | |
| Main | Auxiliary | ||
|
MEV-1,2 (NGC, 2019, 2020) |
2.3/2.9 t N/A |
Hall thruster 180 mN × 4 |
Monopropellant (Hydrazine) N/A |
|
ION Satellite Carrier (D-Orbit, 2020~) |
500 kg 0.4 × 0.4 × 0.4 m3 |
Bipropellant (C3H6/N2O) 18 N × 6 | - |
|
ADRAS-J (Astroscale, 2024) |
3 t 11 m × 4 m |
Monopropellant (ADN) 1 N × 12 | - |
|
ClearSpace-1 (ESA, planned) |
580 kg 1.3 m × 1.6 m |
Green propellant N/A | - |
|
Space Drone (ESS, planned) |
400 kg 0.9 × 1.1 × 1.6 m3 |
Ion thruster 15 mN × 4 | Cold gas N/A |
| Space explorer | |||
| Mission |
Spacecraft spec. (Mass & Size) | Propulsion system | |
| Main | Auxiliary | ||
|
Hayabusa-1,2 (JAXA, 2003, 2014) |
510/600 kg 1.0 × 1.6 × 1.1 m3 1.0 × 1.6 × 1.3 m3 |
Ion thruster 8-10 mN × 4 |
Bipropellant (Hydrazine/MON-3) 20 N × 12 |
|
BepiColombo (ESA/JAXA, 2018) |
4 t 3.9 × 3.6 × 6.3 m3 |
Ion thruster 125 mN × 4 |
Bipropellant (MMH/MON-3) 10 N × 12 |
|
Tianwen-1 (CNSA, 2020) |
5.7 t N/A |
Bipropellant 3,000 N × 1 |
Bipropellant 120 N × 8 25 N × 12 |
|
DART (NASA, 2021) |
615 kg 1.2 × 1.3 × 1.3 m3 |
Monopropellant (Hydrazine) 1 N × 12 | - |
|
KPLO (KARI, 2022) |
678 kg 1.82 × 2.14 × 2.29 m3 |
Monopropellant (Hydrazine) 30 N × 4 |
Monopropellant (Hydrazine) 5 N × 8 |
|
Psyche (NASA, 2023) |
2.6 t N/A |
Hall thruster 280 mN × 4 |
Cold gas N/A |
우주 화물 수송선의 경우, 현재까지 ISS에 화물을 운반하는 임무에서 메인 및 보조 추진시스템 모두 화학추진시스템이 주로 사용되었다. 한편, Lunar Gateway CMV에는 달 궤도 화물 운반과 Gateway의 궤도 유지에 전기추진시스템이 적용되며, 자세제어 및 회피 기동과 같이 고추력이 필요한 상황을 위한 화학추진시스템이 함께 탑재될 예정이다.
궤도상 서비싱 우주선의 메인 추진시스템은 임무 특성에 따라 다르다. 위성 견인 및 위성 수명 연장 임무를 수행하는 MEV-1,2와 Space Drone에는 전기추진시스템이 탑재되었으며, 초소형 위성 배치나 우주쓰레기 근접 및 관찰, 제거 임무인 Ion Satellite Carrier, ADRAS-J, ClearSpace-1에는 화학추진시스템이 활용되었다. 모든 임무에서 보조 추진시스템으로는 화학추진시스템이 활용된다.
우주탐사선의 경우, DART나 다누리와 같이 화학추진시스템을 활용하여 임무를 수행한 사례가 있는 반면, Hayabusa, BepiColombo, Psyche와 같은 심우주 탐사선에서는 전기추진시스템이 주로 사용되고 있다. 마찬가지로 보조 추진시스템으로는 화학추진시스템이 탑재된다.
요약하면, 임무 특성에 따라 추진시스템이 결정된다. 짧은 임무시간과 높은 추력이 요구되는 임무에는 화학추진이, 긴 수명과 고효율이 중요한 임무에는 전기추진이 주력으로 활용된다. 급격한 자세 변경이나 충돌회피와 같이 순간적으로 높은 추력밀도가 필요한 상황에서는, 화학 추력기가 가장 신뢰할 수 있는 수단으로 운용되고 있다. 다만, 최근에는 일반적인 임무들인 궤도 상승부터 정지궤도 운용까지 전 구간을 전기추진시스템으로 수행하는 Full-EP 위성의 보급과 더불어, 유인탐사, 심우주 수송 임무를 수행하기 위한 고전력(수십–수백 kW급) 전기추진 기술 개발이 가속화되고 있어, 전기추진의 역할이 매우 크게 확대되고 있다.
