

1. 서 론
2. 초기 PPT 개발(1960−2000년대)
2.1 10 W 미만 추력기
2.2 10-100 W 추력기
2.3 100 W 이상 추력기
3. 최근 PPT 개발(2010년 이후)
3.1 10 W 미만 추력기
3.2 10-100 W 추력기
4. FM 활용 사례 분석
5. 결 론
1. 서 론
인공위성의 우주추진에 활용되는 전기추력기(electric thruster)는 화학식 추력기(chemical thruster)에 비해 상대적으로 비추력(specific impulse)이 높아, 추진제의 무게를 줄이고 발사체 비용을 낮추거나 탑재체 중량을 증가시킬 수 있다. 그러한 이유로, 장시간의 임무 기간이 요구되는 심우주 탐사에 적합한 추진 방식으로 알려져 있다[1,2].
전기추력기는 추진제의 가속 원리에 따라 전열추진(electrothermal propulsion), 정전기추진(electrostatic propulsion), 전자기추진(electromagnetic propulsion) 방식으로 크게 세 가지의 타입으로 분류할 수 있으며, 이 중 펄스 플라즈마 추력기(pulsed plasma thruster, PPT)는 전자기 방식으로 추력을 얻는다[1].
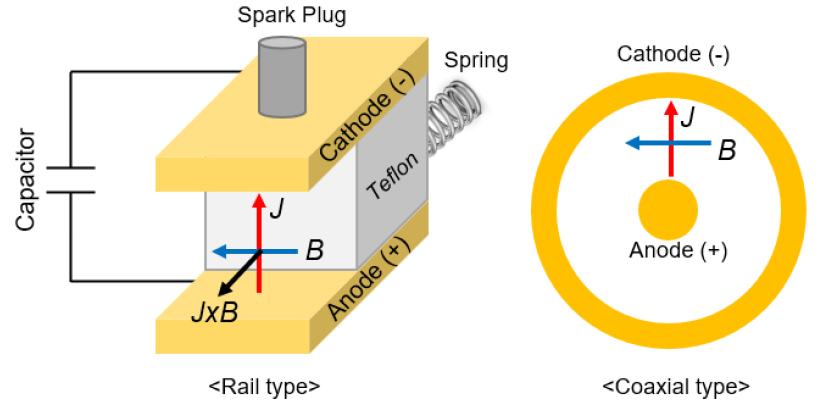
PPT의 타입은 전극(electrode)의 형상 및 배치, 추진제의 공급 방식에 따라 분류할 수 있으며, 두 전극의 배치를 레일 또는 동축(coaxial) 형태로 구성하거나, 추진제를 종방향 또는 횡방향으로 공급하는 방식으로 나눌 수 있다[2]. 전극 배치에 따른 레일 타입과 동축 타입 PPT의 원리 및 구성을 Fig. 1에 나타내었다. PPT의 구성요소는 전극, 축전기, 스파크 플러그(spark plug), 추진제, 추진제 공급장치로 이루어져 있으며, 추력기 작동원리는 크게 세 단계로 분류할 수 있다. 첫 번째, 두 전극에서 음극(cathode)에 위치한 스파크 플러그를 점화하여, 아크(arc) 방전을 일으키기 위한 소량의 초기 전자 및 플라즈마(plasma)를 제공한다. 두 번째, 축전기에 연결된 두 전극 사이의 높은 전위차로 인해 아크 방전이 발생하면, 아크 전류로 인해 추진제가 열분해되어 플라즈마를 생성한다. 세 번째, 아크 방전이 일어나는 동안 생성된 플라즈마는 두 전극에서 유도된 자기장(induced magnetic field)에 의해 로렌츠힘(Lorentz force)으로 가속된다[3].
PPT의 연료는 대표적으로 테플론(teflon)과 같은 고체 추진제를 사용하고, 스프링을 활용하여 기계적인 힘으로 추진제를 공급하기 때문에 연료탱크나 밸브와 같이 복잡한 연료공급 시스템이 요구되지 않는다. 이로 인해 추진시스템의 구조가 간단하고, 상대적으로 낮은 소모전력에서 운용이 가능하여 소형위성에 적합하다. 또한, 추력기의 동작을 펄스 형태로 제어할 수 있고, 약 10−100 μN급으로 매우 낮은 추력 범위를 가지고 있기 때문에 위성의 정밀한 자세제어에 장점을 가지고 있다.
PPT는 축전기에 충전된 에너지가 커질수록 추력이 증가하고, 축전기의 충전 및 방전 주기를 결정하는 펄스 진동수(pulse frequency)를 제어하여 위성에서 요구되는 추력 레벨을 결정할 수 있다[4]. 따라서, 위성 탑재용 PPT는 미션 요구조건에 따른 추력기 성능, PPU(power processing unit)의 효율, 위성의 전력 제한 등 여러 가지 변수에 따라 작동 주기 및 작동 전력이 결정될 수 있다[5].
본 논문에서는, 개발이 시작된 1960년대부터 2000년대까지를 초기 PPT 개발, 큐브위성 활용이 본격적으로 활발해진 2010년 이후를 최근 PPT 개발로 나누었고, 이를 작동 전력 범위에 따라 분석하였다. 또한, 추력기의 개발 종류가 다양하여, 비행 모델(flight model, FM) 추력기를 중심으로 활용현황과 임무를 분석하였다.
2. 초기 PPT 개발(1960−2000년대)
PPT는 1964년 러시아의 Zond-2 위성의 자세제어용 추력기 탑재를 시작으로 러시아, 미국, 일본, 중국 등 주요 국가에서 활발하게 연구개발이 진행되었다. 초기 개발 모델은 PPT에 대한 개념이 정립된 시기이므로 전극과 추진제의 종류, 배치 및 형상, 방전 특성에 따른 설계 연구가 진행되었으며, 작동되는 전력 및 성능 범위가 넓고, 주로 소형 또는 중형위성(1000 kg 이하)에 활용되었다.
2.1 10 W 미만 추력기
2.1.1 LES-6(미국, 1968년)
LES-6은 미국에서 PPT가 처음으로 활용된 163 kg급 소형위성이며, 궤도제어를 목적으로 추력기를 탑재하였다. LES-6의 형상(Fig. 2)은 직경 48 in, 길이 66 in를 가진 원통형 위성이고, 가운데 면에 탑재된 4개의 PPT를 이용하여 GSO(geosynchronous orbit)에서의 동서방향 위치유지(east-west station keeping)를 수행하였다.

본 위성의 특징적인 부분은 태양 센서와 지구 센서, 위성의 회전율 데이터를 통해 정확한 각도 및 위치에서 PPT를 작동시키는 피드백 제어 시스템을 구성하여, 위성의 궤도가 기준 경도값(reference longitude)의 ±2°내에 위치하게 하는 자동궤도제어 시스템을 위성에 적용하였다[6,7]. LES-6 PPT(Fig. 2)의 전력 및 추력 성능을 Table 1에 나타내었다. LES-6에는 추진시스템의 안정성 및 신뢰성을 위해 하나의 추력기에 두 개의 노즐(nozzle)을 갖도록 하였으며, 위성의 회전축과 추력 벡터(thrust vector)가 수직 방향을 향하도록 총 4개의 추력기가 배치되어, 위성이 90°회전할 때마다 하나씩 작동하여 한 방향으로 추력을 발생시킨다.
Table 1.
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 2.5 | 1.85 | 17.8 | 300 | 280 | 1.8 |
PPU와 추력기의 질량은 각각 873 g, 1.4 kg이고, 비행 검증을 위한 수명, 열 진공 환경, 충격 및 진동 시험을 진행하였다[6]. 펄스 작동 진동수 1−4 Hz 범위로 시험한 결과, 최대 1600시간 작동하는 동안 펄스 횟수 8.7×106회를 달성하였고, 평균 비추력 308 s, 펄스당 추력은 23.8 μN·s으로 측정되었다. 충격 시험은 0.2 ms 동안 850 G를 가하였고, 진동 시험은 18.8 Grms으로 3 분간 진행한 후 추력기 성능을 검증해본 결과, 시험 전후 성능 차이가 미미했다. 또한, 진공도 1×10-5 torr, 온도 –40−60℃ 환경에서 원활하게 작동하였다.
2.1.2 TMIT-PPT(일본, 2001년)
TMIT-PPT는 일본의 NASDA(National Space Development Agency)와 TMIT(Tokyo Metropolitan Institute Technology)에서 50 kg급 위성인 µ-Lab Sat II에 궤도 또는 자세제어를 PPT를 통해 시험하고자 개발하였다[8].
TMIT-PPT(Fig. 3)의 상세한 성능 특성을 Table 2에 나타내었다. ETS-Ⅳ에 사용된 PPT 형상에서 전극, 추진제 표면적을 변경하여 아크방전 시 추진제 표면에 발생하는 탄화 현상을 개선하였으며, 전극의 소재, 축전기 에너지, 후드(hood) 각도에 따른 실험을 진행하여 성능을 비교하였다[9]. EM으로 제작된 추력기의 펄스 진동수는 0.75 Hz이고, PPU를 포함한 전체 추진시스템의 질량과 크기는 각각 1367 g, 173×110×120 mm3이다[9,10,11].

Table 2.
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 4.2 | 3.3 | 22 | 1127 | 170 | 4.9 |
2.1.3 STSAT-2(한국, 2005년)
한국의 100 kg급 과학기술위성 2호(STSAT-2)의 모멘텀 덤핑(momentum dumping)을 수행하기 위한 목적으로 PPT(Fig. 4)를 개발하였다. STSAT-2 PPT의 성능을 Table 3에 나타내었고, 축전기는 1500 V, 1.6 μF으로 사용하여 펄스당 13 μg의 추진제를 소모하며, 위성의 피치 축(pitch-axis) 기준으로 0.009 N·m의 각운동량을 발생시킨다[12].

Table 3.
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| <10 | 1.8 | 25 | 800 | 13.5 | 5.5 |
2.1.4 FalconSat-3(미국, 2007년)
미국의 54 kg급 위성인 FalconSat-3(Fig. 5)의 3축 자세제어를 수행하기 위해 AFRL과 Busek에서 MPACS (micro propulsion attitude control system)를 개발하여, 위성 상단부에 총 4개의 추진 모듈을 탑재하였다[15,16]. MPACS(Fig. 6)의 성능을 Table 4에 나타내었고, 추진 모듈은 1U 크기를 가지며, 3개의 축에 추력기가 하나씩 배치되어있다. 추력기는 기존의 PPT보다 소형화된 직경 3.2 mm의 동축 타입 μPPT(Micro-PPT)(Fig. 6)를 개발하여, 추진제 공급 스프링과 스파크 플러그를 없애고 추진시스템의 무게와 부피를 감소시켰다[17,18].


2.2 10-100 W 추력기
2.2.1 Zond-2(러시아, 1964년)
PPT가 처음 활용된 사례인 Zond-2(Fig. 7)는 890 kg급 위성이고, 자세제어를 위해 6개의 추진 모듈을 탑재하였다. 동축 타입 PPT(Fig. 7)의 성능을 Table 5에 나타내었고, 외경, 내경, 길이는 각각 62 mm, 20 mm, 80 mm이며, 전체 추진시스템의 질량은 28.5 kg이다. 축전기는 1060 V, 100 μF을 사용하였고, 160시간 동안 펄스 5.8×105회를 작동한 결과, 최종 추력 평가에서는 추력이 약 12%만큼 감소하였다[22].

2.2.2 LES-7(미국)
LES-7 PPT(Fig. 8)의 성능을 Table 6에 나타내었으며, LES-6 PPT에서 전력과 추진제 면적을 증가시켜 추력, 비추력을 향상시키고, 추력 벡터를 조정하기 위해 Fig. 8과 같이 추력기의 두 노즐 사이 각도를 60°로 설계하여, 궤도유지와 3축 자세제어를 가능하게 만들었다. 또한, 높은 총 임펄스(total impulse)가 요구되는 미션을 수행하기 위해 테플론 추진제를 직경 12 in인 나선형 코일로 보관 및 공급하는 시스템을 구상하여, 356,000 N·s의 총 임펄스를 가진다[23,24,25].

2.2.3 SMS(미국, 1974년)
SMS(synchronous meteorological satellite)는 227 kg급 위성이며, 회전율 제어를 위해 PPT를 탑재하였다. SMS PPT(Fig. 9)의 성능을 Table 7에 나타내었고, 펄스 진동수 0.83-1.83 Hz와 소모전력을 12-20 W로 조정하여 가변추력을 발생시켰다[26]. 추진시스템은 1450 V, 4 μF 축전기 두 개를 사용하여 펄스당 추력 111 μN·s, 펄스 1.3×107회를 달성하였고, 5년의 임무기간 동안 추진시스템을 활용할 수 있게 설계되었다[27].

Table 7.
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 12-20 | 8.4 | 93-204 | 405 | 1720 | 2.6 |
2.2.4 LES-8/9(미국, 1975년)
LES-8/9는 454 kg급 위성이며, LES-7 PPT와 마찬가지로 두 노즐 사이 각도가 60°인 추력기 6개를 위성 양면에 배치하여, 궤도 위치유지와 3축 자세제어를 수행할 수 있게 하였다[28,29]. LES-8/9 PPT(Fig. 10)의 성능을 Table 8에 나타내었으며, 추력기 하나의 질량은 6.6 kg이고, 축전기는 1538 V, 17 μF를 사용하여 펄스 횟수 3.4×107을 달성하였다[28,29].

Table 8.
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 25.5 | 20 | 297 | 1000 | 7320 | 7.3 |
2.2.5 TIP, NOVA(미국, 1975년)
TIP, NOVA 위성 시리즈는 각각 94 kg, 166 kg 위성이며, 고도 약 1200 km 이하인 지구 저궤도에서의 항력 보상(drag compensation)을 위해 2개의 PPT를 탑재하였다. TIP, NOVA PPT의 성능을 Table 9에 나타내었으며, 축전기는 1600 V, 15 μF을 사용하였고 추력기 하나당 테플론 추진제의 질량은 450 g, 펄스당 약 45 μg의 추진제를 소모하며, 총 펄스 횟수가 1.3×107이다.
Table 9.
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 30 | 20 | 374 | 840 | 4448 | 7.7 |
2.2.6 ETS-Ⅳ(일본, 1981년)
ETS-Ⅳ(engineering test satellite) 위성은 일본의 NASDA에서 개발한 640 kg급 테스트용 위성으로, 회전율 제어를 위해 총 4개의 PPT를 탑재하였다. 직경 2.18 m, 높이 2.8 m의 위성(Fig. 11)의 중간 부분에 PPT가 배치되어, 두 개의 추진 모듈이 한 쌍을 이루어 작동하며 위성의 회전율을 조절한다[31]. ETS-Ⅳ PPT의 성능을 Table 10에 나타내었으며, 테플론 추진제 표면의 크기는 25 mm x 20 mm이고, 축전기는 1500 V, 2 μF으로 2.3 J의 에너지를 공급하며, 펄스 진동수 1.4-1.6 Hz에서 펄스당 추력이 29.4 μN·s으로 측정되었다. 또한, PPT, PPU, 하네스(harness)를 포함한 추진시스템의 총 질량은 21 kg이다[9,31].

Table 10.
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 20(Max.) | 2.3 | 47 | 300 | 8.8 | 1.9 |
2.2.7 EO-1(미국, 2000년)
EO-1(Fig. 12)은 573 kg급 지구 관측용 위성이고, 피치 축에 대한 자세제어를 위해 PPT를 탑재하였으며, Fig. 12의 오른쪽과 같이 추력기에 양방향으로 노즐이 존재하여, 하나의 축에 대한 자세제어가 가능하다[32,33,34]. EO-1 PPT의 성능을 Table 11에 나타내었으며, 펄스 진동수 1 Hz일 때, 축전기 충전 시간을 160-920 ms으로 조절하여 저장되는 에너지양을 변화시킴으로써 가변추력을 얻을 수 있게 하였다. 또한, 축전기는 1720 V, 40 μF을 사용하였고, 추진시스템의 총 질량은 4.95 kg이다.

Table 11.
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 12-70 | 8.5-56 | 90-860 | 650-1400 | 450 | 8 |
2.2.8 Dawgstar PPT(미국, 2000년)
Dawgstar는 13 kg급 나노위성으로 미 공군의 ION-F (ionospheric observation nanosatellite formation) 미션 수행을 위해 워싱턴대학교와 Primex Aerospace Company (PAC)에서 개발하였다[36]. Dawgstar PPT(Fig. 13)는 EO-1 위성에 탑재된 PPT에서 질량, 부피를 줄이기 위해 크기를 축소하여 디자인하였다. 하나의 모듈에 2개의 추력기를 가지고 있고, 총 4개의 모듈이 탑재되어 전체 추진시스템의 질량은 4.2 kg이다. 추력기의 축전기는 2.8 kV, 1.3 μF을 사용하여 총 펄스 횟수가 1.7×106이고, 자세제어 시 궤도 평균 소모전력 3.3 W(1 Hz), 편대 비행(formation flying) 수행 시 소모전력은 13 W(2 Hz)이며, 이때의 성능을 Table 12에 나타내었다[36,37,38,39].

2.3 100 W 이상 추력기
2.3.1 MightySatⅡ series(미국, 2000년)
MightySatⅡ.1은 121 kg급 위성으로, 궤도제어를 위한 레일 타입 PPT를 개발하였고, 후속 위성인 MightySat Ⅱ.2에는 향상된 성능의 동축 타입 PPT를 개발하였다[40,41,42]. MightySatⅡ PPT(Fig. 14)의 성능을 Table 13, 14에 나타내었으며, 레일 타입과 동축 타입 PPT의 펄스당 추력은 각각 750, 1400 μN·s이고, T/P(thrust to power ratio)는 각각 17, 50 μN/W으로 동축 타입이 약 3배 더 높다[40,42].

Table 13.
Specification of the MightySat Ⅱ.1 PPT [40].
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 100 | 43 | 1340 | 1150 | 11000 | 9.8 |
Table 14.
Specification of the MightySat Ⅱ.2 PPT [42].
| PPT(Coaxial, Side-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 66-133 | 28 | 4200 | 515 | - | 12.6 |
3. 최근 PPT 개발(2010년 이후)
2010년 이후, 민간 주도의 우주산업으로 발전하는 뉴스페이스시대가 도래하여 발사체 시장이 활성화되고, 위성 관련 부품 기술이 발달함에 따라 다양한 목적으로 활용할 수 있는 초소형위성 또는 큐브위성에 대한 수요가 증가하였다. 이러한 위성에 탑재할 수 있는 추력기는 크기가 작고 소모전력이 낮아야 하므로, 저전력 PPT의 개발 및 활용이 증가하였으며, 대부분 15 kg급 이하인 초소형위성에 활용되었고, PPT 소모전력은 대부분 약 10 W 이하이다.
3.1 10 W 미만 추력기
3.1.1 PROITERES(일본, 2012-2018년)
일본의 OIT(Osaka institute of technology)에서 제작한 PROITERES 1(Fig. 15)은 15 kg급 나노위성이고, 전기추력기를 이용한 비행 시험을 위해 동축 타입 PPT를 탑재하였다. 두 번째로 제작된 45 kg급 위성인 PROITERES 2에는 PPT 성능을 높이기 위해 축전기 에너지를 2.4 J에서 31.6 J로 증가시켰으며, 여러 개의 추력기 헤드로 구성된 MDR(multi-discharge room) PPT를 개발하였다(Fig. 16). PROITERES PPT의 성능을 Table 15, 16에 나타내었고, 두 가지 모두 동축 전열 타입 PPT이므로 펄스 횟수가 증가할수록 추력이 감소하고, 비추력이 증가한다[43,44].


Table 15.
Specification of the PROITERES 1 PPT [43].
| PPT(Coaxial, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 5 | 2.43 | 75-250 | 600-800 | 5.4 | 12-30 |
Table 16.
Specification of the PROITERES 2 PPT [44].
| PPT(Coaxial, Teflon) | |||||
| P(W) | E(J) | T(mN) | Isp(s) | Itot(N·s) | ηT(%) |
| 30 | 31.6 | 1.4-2.4 | 341-590 | 66 | 12-14 |
3.1.2 PPTCUP(미국, 2014년)
PPTCUP(pulsed plasma thruster for cubesat propulsion)은 큐브위성의 추진시스템 활용을 위해 개발된 상업용 PPT(Fig. 17) 제품이다. PPTCUP의 성능을 Table 17에 나타내었고, 추진 모듈은 약 0.3U 크기에 질량 270 g을 가지며, 항력보상, 궤도유지를 수행하여 위성의 임무 수명을 증가시킬 수 있도록 개발되었다[45].

Table 17.
Specification of the PPTCUP[45].
| PPT(Rail, Side-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 2.7 | 2 | 40 | 655 | 48 | 6.4 |
3.1.3 AV-3(싱가포르, 일본, 2016년)
AV-3(Aoba-Velox-Ⅲ)는 2U(2.3 kg) 큐브위성이며(Fig. 18), 고도 400 km인 지구 저궤도에서의 항력보상 및 자세제어를 위해 dPPT(dual-axis PPT) 추진 모듈(Fig. 19)을 개발하였고, 추력기의 성능을 Table 18에 나타내었다. 총 질량이 490 g인 추진 모듈의 2축 방향으로 추력기가 각각 하나씩 탑재되어 있어 자세제어를 수행할 수 있다[47].


Table 18.
Specification of the AV-3 dPPT[47].
| PPT(Flared Rail, Side/Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 2.25 | 2.25 | 39 | 543 | 53 | 4.6 |
3.1.4 AX-3(중국, 2017년)
AX-3는 12U 큐브위성이며, 궤도유지와 자세제어를 위해 PPT(Fig. 20)를 탑재하였다[49]. 추진 모듈의 3개의 축 방향으로 추력기가 하나씩 배치되어있고, 총 2개의 추진 모듈이 큐브위성에 사용되었으며, PPT의 성능을 Table 19에 나타내었다.

Table 19.
Specification of the AX-3 PPT[49].
| PPT(Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 5 | 2.2 | 40 | 600 | 60 | 5.3 |
3.1.5 Pegasus(오스트리아, 2017년)
Pegasus는 2U(2 kg) 큐브위성이며, 자세제어를 위해 PPT를 탑재하였다(Fig. 21). PPT의 성능을 Table 20에 나타내었으며, 하나당 2.2 μN의 추력을 발생시키는 4개의 PPT가 배치되어있어, 최대 6 m/s의 속도 증분을 얻을 수 있다[50].

Table 20.
Specification of the Pegasus PPT[50].
| PPT(Coaxial, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 2.25 | - | 8.8 | 600 | 5.7 | - |
3.1.6 AV-4(싱가포르, 일본, 2019년)
AV-4(Aoba-Velox-Ⅳ)는 2U(2.5 kg) 큐브위성의 궤도유지와 자세제어를 위해 PPT를 탑재하였고(Fig. 22), 추력기의 성능을 Table 21에 나타내었다. 0.5U 크기의 추진 모듈에 4개의 추력기가 배치되어있고, 추력기당 5.7 g의 테플론이 저장되어있으며, 펄스당 3.8 μg의 추진제를 소모한다[51].

Table 21.
Specification of the AV-4 PPT[51].
| PPT(Flared Rail, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 2.25 | 2.25 | 25.2 | 676 | 152 | 3.7 |
3.1.7 HuskySat-1(미국, 2019년)
HuskySat-1은 3U(3.1 kg) 큐브위성(Fig. 23)이고, 추력기 동작으로 인한 속도 증분을 측정하기 위해 동축 타입 PPT(Fig. 24)를 탑재하였다. 추력기 성능을 Table 22에 나타내었고, 0.55U 사이즈의 추진 모듈에 고체 황(sulfur) 추진제 60 g을 사용하여 약 100 m/s의 속도 증분을 얻을 수 있으며, 펄스 작동 진동수 0.25 Hz일 때, 펄스당 추력 500 μN·s의 성능을 가진다[52].


Table 22.
Specification of the HuskySat-1 PPT[52].
| PPT(Serrated Coaxial, Breech-fed, Sulfur) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 3 | 10 | 125 | 680 | 400 | 16.7 |
3.1.8 PETRUS(독일, 2022년)
PETRUS(pulsed electric thruster of the university of stuttgart)는 동축 타입 PPT이고, 우주에서의 추진시스템 실험을 위해 GreenCube(3U)와 SONATE-2(6U)(Fig. 25)에 탑재하였으며, 추력기 동작으로 인한 위성의 회전속도 변화로 추력을 측정하였다. 각각의 성능을 Table 23, 24에 나타내었고, 추진 모듈(Fig. 26)은 크기 1U, 질량 419 g을 가진다[54,55].

Table 23.
Specification of the GreenCube PPT[54].
| PPT(Coaxial, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 1 | 0.8 | 10 | 700 | 3.4 | 4 |
Table 24.
Specification of the SONATE-2 PPT[55].
| PPT(Coaxial, Breech-fed, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 1.4 | 1.1 | 26 | 788 | - | 9.5 |

3.1.9 BMP-220(미국)
BMP-220(Fig. 27)은 Busek의 MPACS 이후 개발된 동축 타입 PPT이고, 큐브위성이나 초소형위성에 탑재하여 다양한 임무에 활용할 수 있는 상업용 제품이며, Table 25에 성능을 나타내었다. 크기 0.5U, 질량 500 g인 추진 모듈에 총 12개의 동축 타입 PPT가 탑재되어 있으며, 연속적으로 방전되어 추력을 발생시킨다[56].

3.2 10-100 W 추력기
3.2.1 FPPT(미국, 2022년)
FPPT(fiber-fed pulsed plasma thruster)는 테플론 섬유를 사용하여 총 임펄스를 크게 증가시켰으며, 전자기 코일(electromagnetic coil)을 활용하여 자기장 방향을 변화시킴으로써 추력 벡터를 약 ±10°로 조정할 수 있다. 추력기 성능을 Table 26에 나타내었고, 추진 모듈(Fig. 28)은 1.7U 크기를 가지며, DUPLEX 6U 큐브위성에 탑재하여 발사될 예정이다[58].
Table 26.
Specification of the FPPT[58].
| PPT(Coaxial, Teflon) | |||||
| P(W) | E(J) | T(μN) | Isp(s) | Itot(N·s) | ηT(%) |
| 48 | 32 | 330 | 3500 | 28000 | 13 |

3.2.2 APPT series(러시아, 2012-2021년)
러시아의 RIAME(research institute of applied mechanics and electrodynamics)에서 개발한 APPT(Fig. 29, 30) 시리즈는 소형위성의 궤도제어를 위해 축전기 에너지(8-155 J)에 따라 추력기를 제작하였으며, 그 중 APPT-45-2와 APPT-155가 각각 MKA-FKI PN-2(283 kg), Soyuz-Sat-O 위성의 FM으로 개발되었다. APPT 시리즈의 성능을 Table 27에 나타내었고, 전체 추진시스템의 질량은 소모전력에 따라 2-20 kg의 범위를 가진다[59,60].


4. FM 활용 사례 분석
PPT를 탑재한 위성의 질량을 연도별, 소모전력으로 구분하여 비교하면(Fig. 31, 32), 처음 활용되던 초기에는 100 kg급 이상의 위성에 주로 활용되었으나, 2000년대 이후에는 100 kg급 이하의 위성에서 PPT의 활용이 증가하였고, 이러한 위성에 탑재된 추력기의 전력은 약 50 W 미만으로 운용되었다. 이는 2000년대 이후 초소형위성의 활용이 크게 증가하면서 저전력 추진시스템인 PPT의 활용이 같이 증가하는 것으로 볼 수 있다. PPT의 소모전력에 따른 추력, 비추력 성능을 Fig. 33에 나타내었으며, 전력이 증가함에 따라 추력은 증가하고, 비추력은 전력과 관계없이 약 500-1500 s 사이의 범위에서 분포하는 것을 확인할 수 있다.



PPT 추진시스템이 자세제어, 궤도제어에 활용된 사례는 각각 13회, 15회로 비슷하게 사용되었고, 2010년 이후 개발되어 탑재된 PPT는 대부분 추진시스템을 활용한 큐브위성의 비행 임무를 시험하기 위해 사용되었다.
5. 결 론
본 논문에서는 위성의 다양한 임무에 활용되고 있는 펄스 플라즈마 추력기의 연구개발 현황과 동향을 연도와 소모전력으로 구분하여, 위성의 임무에 따라 살펴보았다.
PPT의 타입은 크게 전극의 형상 및 배치에 따라 레일 또는 동축 형태로 구분할 수 있으며, PPT의 타입에 따라 주요 성능특성이 다르게 나타났다. 동축 타입 PPT의 평균 T/P는 약 25 mN/kW, 비추력 약 600 s, 추력 효율 약 13.2%이며, 레일 타입 PPT의 평균 T/P는 약 13 mN/kW, 비추력 약 823 s, 추력 효율 약 6.9%로 나타났다. 동축 타입 PPT의 T/P와 효율이 레일 타입 보다 약 2배 더 높았고, 비추력은 상대적으로 소폭 낮게 나타났다. 이러한 특징으로 인하여, 2000년대 이후에는 대부분 동축 타입의 PPT가 개발되었으며, 특히 2010년 이후 2U−6U 큐브위성 추진시스템 탑재를 위해 저전력 작동이 가능하고 추력이 비교적 높은 동축 타입 PPT가 주로 활용되었다.
PPT는 전극 배치 및 형상, 소모전력 등 주요 설계 변수에 따라 자세제어, 궤도제어 임무 요구조건을 모두 만족시키는 성능 범위를 가지기 때문에 활용도가 높고, 주어진 용도와 목적에 따라 다양한 설계 방식을 적용할 수 있는 추력기이다. 최근 들어, PPT의 방전효율을 증가시키기 위해 레이저 점화 방식, 다중 방전, 비대칭 전극, 대체 연료 등 다양한 공학적 설계를 적용하고 있으며, 추진시스템에서는 스풀(spool) 형태로 추진제를 보관하여 총 임펄스를 크게 증가시켜 장기적인 심우주탐사에 적합한 기술을 개발하고 있다. 따라서, 이와 같은 기술개발을 통해, 향후 증가하는 위성의 수요와 우주 임무에 알맞게 PPT의 활용성도 크게 증가할 것으로 보인다.
